2.7 Stochastic, Continuous Time
In continuous time, the state of the system is updated one event at a time.
The total rate of change of the system is \(T = may(H-X) + rX + aX(M-Y) + gY\)
\(Y \rightarrow Y+1\)
\(Y \rightarrow Y-1\)
\(X \rightarrow X+1\)
\(X \rightarrow X-1\)
# The parameters, as list
ross_sxde_par = list(
r = 1/200, # The clearance rate for infections
g = 1/12, # The mosquito daily death rate
a = 1/4, # The mosquito human blood feeding rate
M = 50, # The number of mosquitoes
H = 100 # The number of humans
) ross_sxde = function(XY, pars){
with(as.list(XY), with(pars,{
p1 = a*Y*(H-X)/H
p2 = r*X
p3 = a*X*(M-Y)/H
p4 = g*Y
t = t + rexp(1, p1+p2+p3+p4)
event = sample(1:4, 1, prob=c(p1, p2, p3, p4))
if (event==1) X <- X+1
if (event==2) X <- X-1
if (event==3) Y <- Y+1
if (event==4) Y <- Y-1
return(c(t=t, X=X, Y=Y, x=X/H, y=Y/M))
}))}## t X Y x y
## 0.05978781 11.00000000 10.00000000 0.11000000 0.20000000
## t X Y x y
## 0.1714032 11.0000000 9.0000000 0.1100000 0.1800000
## t X Y x y
## 0.5413876 11.0000000 10.0000000 0.1100000 0.2000000
## t X Y x y
## 0.859444 12.000000 10.000000 0.120000 0.200000
## t X Y x y
## 1.191776 13.000000 10.000000 0.130000 0.200000sim_ross_sxde = function(pars, X0=2, Y0=1, tmax=300){
XY = c(t=0, X=X0, Y=Y0)
tm = XY[1]
XY_t = c()
while(tm < tmax){
XY = ross_sxde(XY, pars)
tm = XY[1]
XY_t = rbind(XY_t, XY)
}
return(list(time=XY_t[,1], X=XY_t[,2], Y=XY_t[,3], x = XY_t[,4], y = XY_t[,5]))
}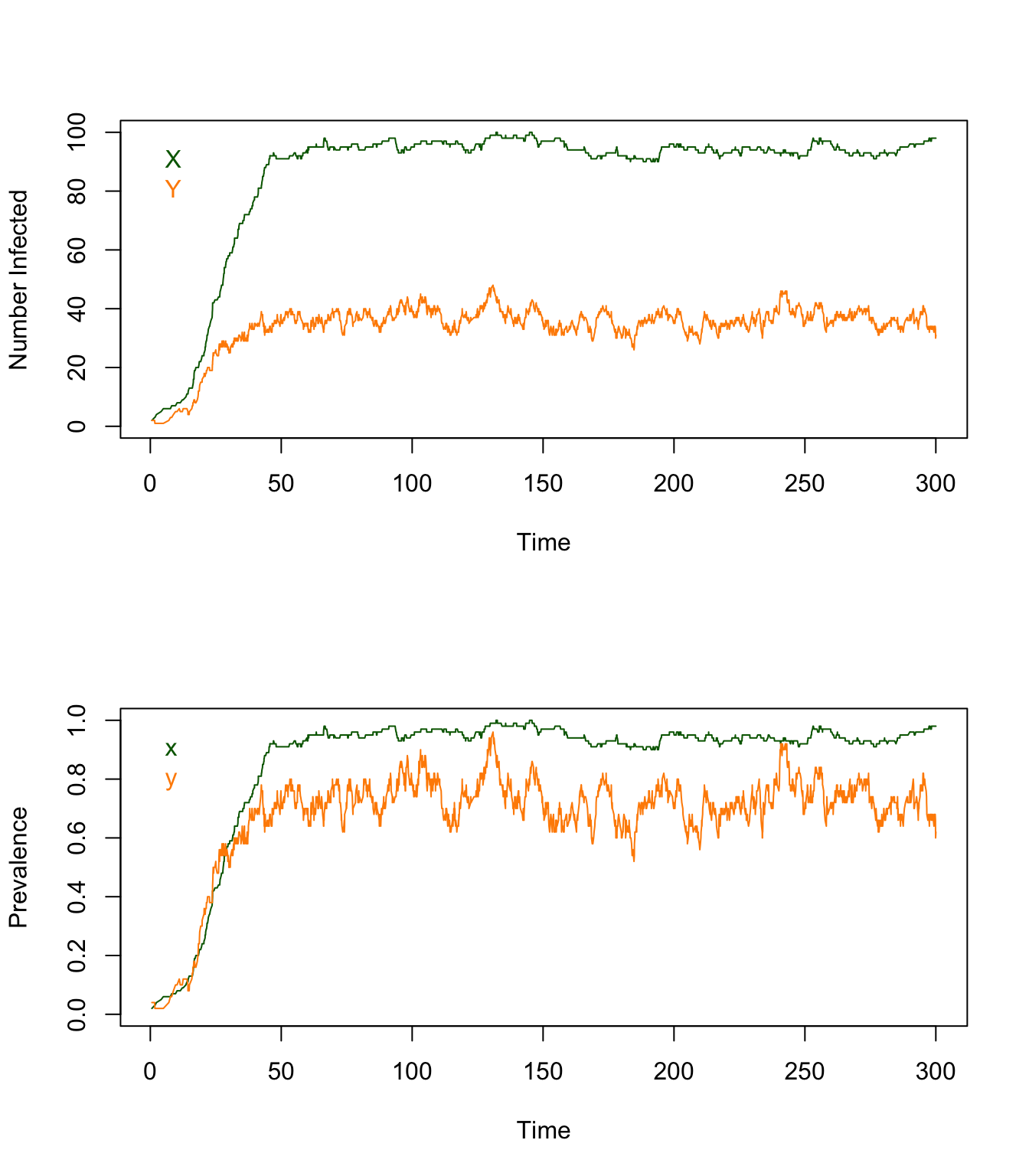
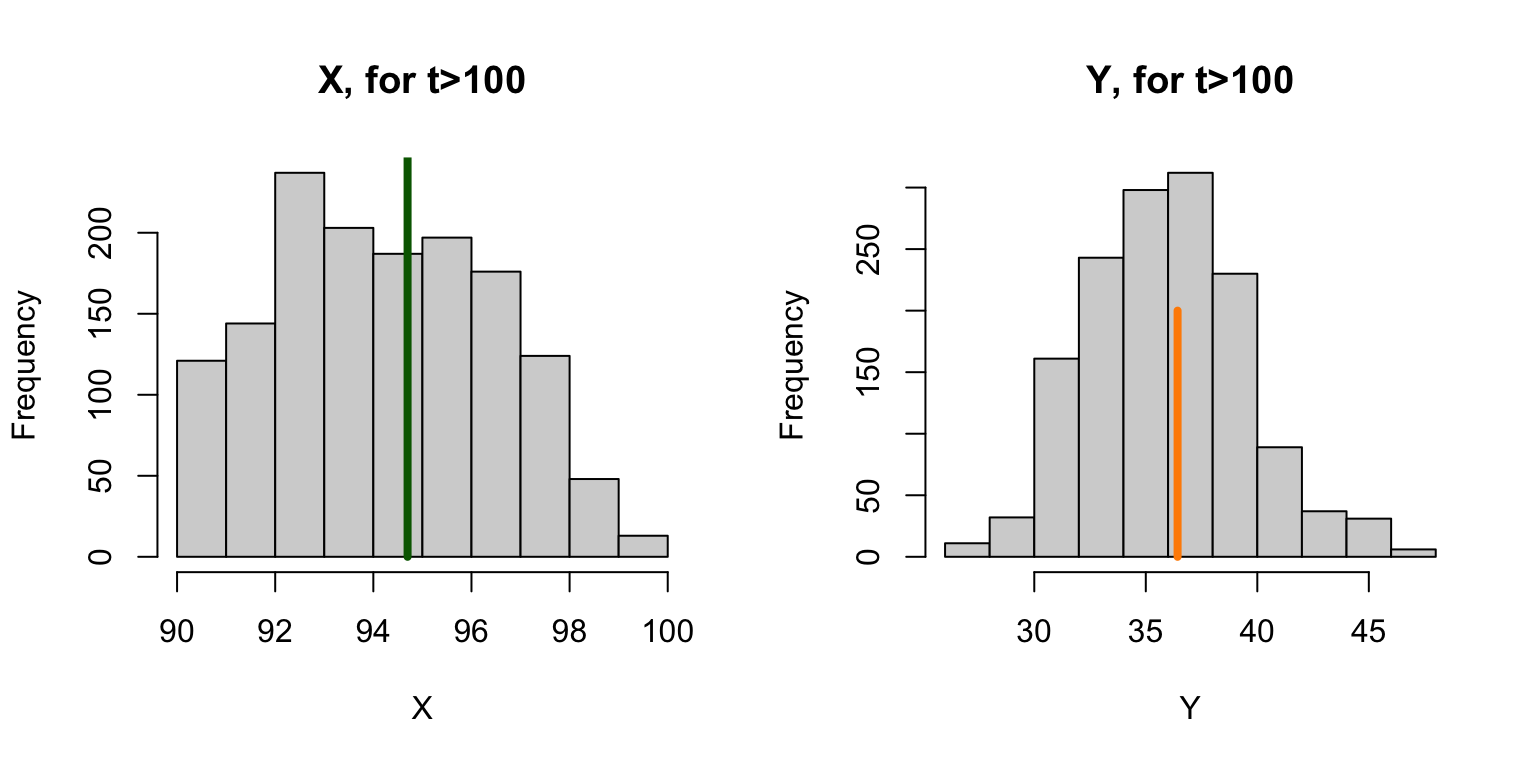
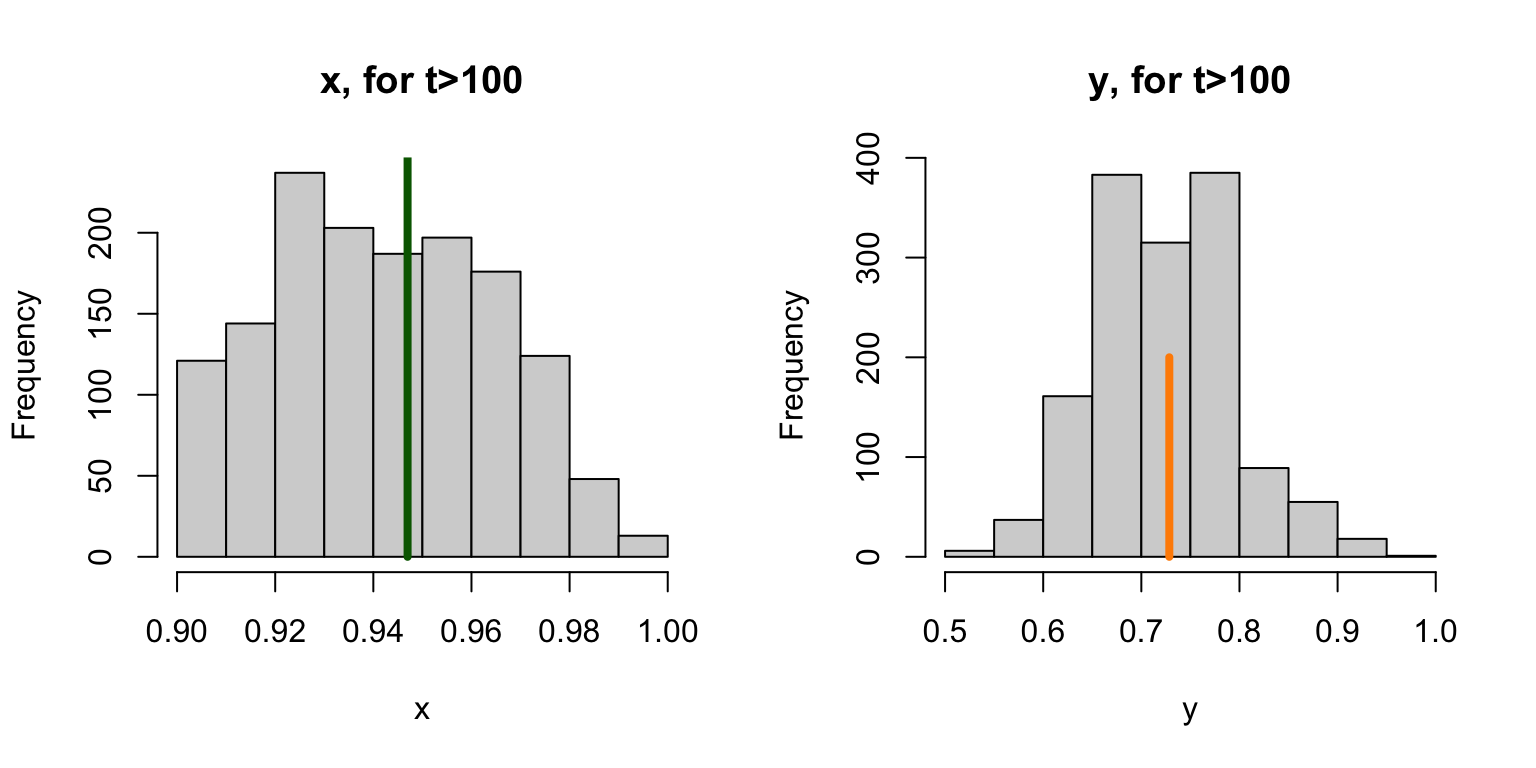
If we want to compare it to the other model, we can compute prevalence: