Multirate Forward-model Disturbance Observer for Feedback Regulation beyond Nyquist Frequency
Abstract
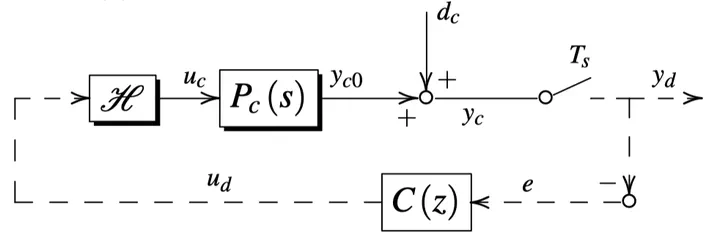
A fundamental challenge in digital and sampleddata control arises when the controlled plant is subjected to fast disturbances with, however, a slow or limited sensor measurement. Such intrinsic difficulties are commonly encountered in many novel applications such as advanced and additive manufacturing, human-machine interaction, etc. This paper introduces a discrete-time regulation scheme for exact sampled-data rejection of disturbances beyond Nyquist frequency. By using a model-based multirate predictor and a forward-model disturbance observer, we show that the intersample disturbances can be fully attenuated despite the limitations in sampling and sensing. In addition, sharing the main properties of all-stabilizing control, the proposed control scheme offers several advantages in stability assurance and lucid design intuitions.
Type
Publication
Proceedings of IEEE American Control Conference