A Dynamic Target Tracking Under Slow and Delayed Vision Feedback
Jan 1, 2019·
 ·
0 min read
·
0 min read
Hui Xiao
Xu Chen
Abstract
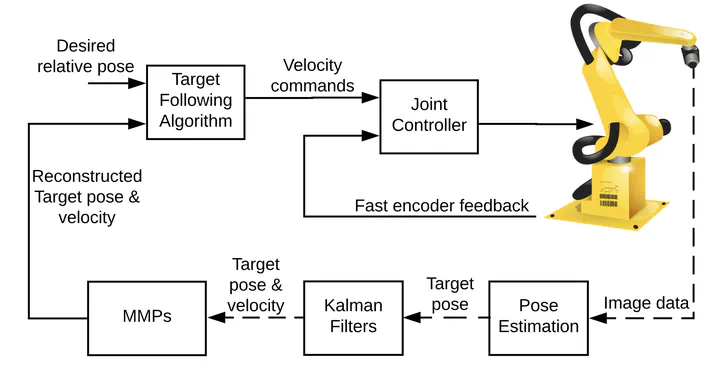
Although vision-based robot control has been extensively studied for over two decades, slow sampling and time delays of visual outputs remain as major limiting factors in practice. In target tracking, significant tracking errors are induced when the target is moving with fast dynamics but the vision feedback is delayed and slow-sampled. This paper proposes a new framework for vision-based target tracking in 3D using partial information of the target dynamics. Kalman filters sampled at low sampling rate are built first to estimate the target 3D position and velocity, then model-based predictors reconstruct fast-sampled target position and velocity data and compensate the time delay. The proposed algorithm was verified with a UR3 robot manipulator equipped with an eye-in-hand camera, where the vision system has 50ms delay and the sampling rate is limited at 20Hz.
Type
Publication
Joint 12th IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles 1st IFAC Workshop on Robot Control