Least Squares Solution for System Identification with Non-uniform Data under a Coprime Collaborative Sensing Scheme
Abstract
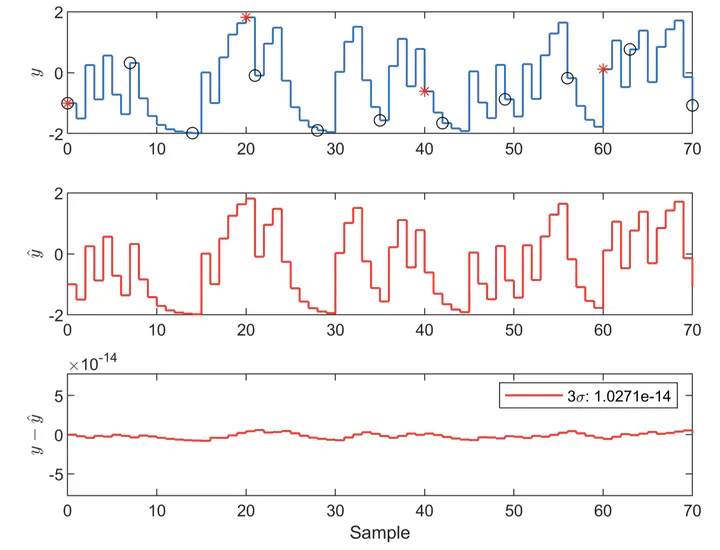
This paper presents a least squares formulation and a closed-form solution for identifying dynamical systems using irregular and sparse data obtained by chronologically merging measurements taken by multiple slow sensors of different sampling rates. We provide the theoretical foundation for developing advanced least-squares-based system identification algorithms for cases where the input-output data are asynchronous and/or scarce. Demonstrative examples are provided to validate the proposed method, and indicate the potential of removing the Nyquist sampling limitation in system identification. We provide in details how using 19 percent of the full measurements enables to capture the dynamics of a dynamic system when two slow sensors are collaboratively collecting the system response at different speeds. The required measurements can be further reduced under the proposed collaborative sensing scheme.
Type
Publication
Proceedings of IEEE American Control Conference