Best Paper on Robotics Award, ASME Dynamic Systems and Control Division
Oct 25, 2024
·
1 min read
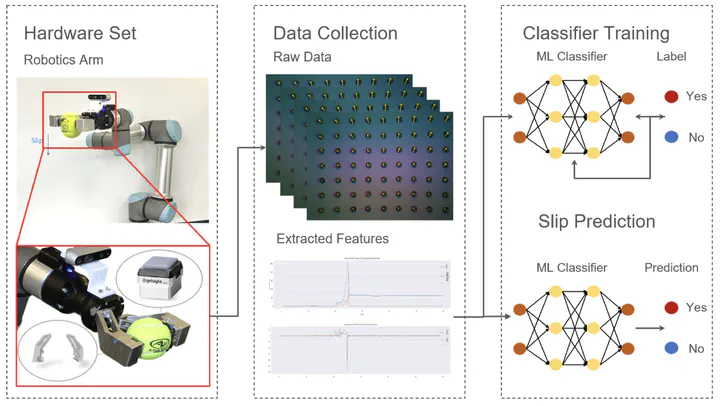
Our work “Learning to detect slip through tactile estimation of the contact force field and its entropy properties” (Xiaohai Hu, Aparajit Venkatesh, Yusen Wan, Guiliang Zheng, Neel Anand Jawale, Navneet Kaur, Xu Chen, and Paul Birkmeyer), presented at MECC 2024, won the best Robotic Paper award from the ASME Dynamic Systems and Control Division. Read the extended journal version of the paper at Elsevier Mechatronics. Huge thanks to Xiaohai(Bob) Hu, who tirelessly iterated through several revisions, and all the other co-authors, for their contributions. A big thank you to Amazon Science for their generous funding that supported this work.