A Recursive System Identification with Non-uniform Data under Coprime Collaborative Sensing
Oct 1, 2023·
 ·
0 min read
·
0 min read
Jinhua Ouyang
Xu Chen
Abstract
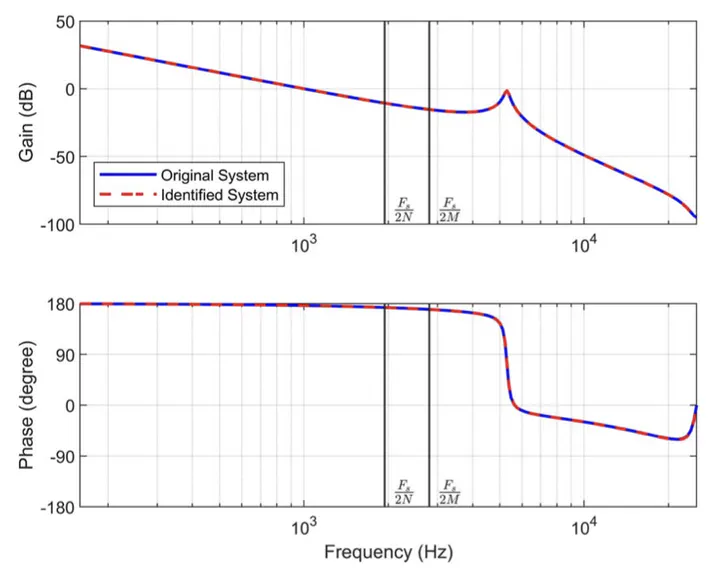
We present a system identification method based on recursive least-squares (RLS) and coprime collaborative sensing, which can recover system dynamics from non-uniform temporal data. Focusing on systems with fast input sampling and slow output sampling, we use a polynomial transformation to reparameterize the system model and create an auxiliary model that can be identified from the non-uniform data. We show the identifiability of the auxiliary model using a Diophantine equation approach. Numerical examples demonstrate successful system reconstruction and the ability to capture fast system response with limited temporal feedback.
Type
Publication
2023 Modeling, Estimation, and Control Conference