Discrete-Time Nonlinear Damping Backstepping Control With Observers for Rejection of Low and High Frequency Disturbances
Jan 1, 2018·
 ,
,
,
·
0 min read
,
,
,
·
0 min read
Wonhee Kim
Xu Chen
Youngwoo Lee
Chung Choo Chung
Masayoshi Tomizuka
Abstract
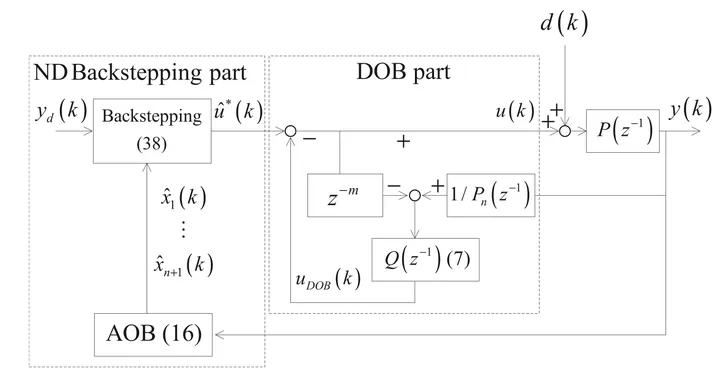
A discrete-time backstepping control algorithm is proposed for reference tracking of systems affected by both broadband disturbances at low frequencies and narrow band disturbances at high frequencies. A discrete time DOB, which is constructed based on infinite impulse response filters is applied to compensate for narrow band disturbances at high frequencies. A discrete-time nonlinear damping backstepping controller with an augmented observer is proposed to track the desired output and to compensate for low frequency broadband disturbances along with a disturbance observer, for rejecting narrow band high frequency disturbances. This combination has the merit of simultaneously compensating both broadband disturbances at low frequencies and narrow band disturbances at high frequencies. The performance of the proposed method is validated via experiments.
Type
Publication
Mechanical Systems and Signal Processing