🚀 New Paper Published in Robotics and Computer-Integrated Manufacturing!
We’re excited to share our latest work, “iLSPR: a learning-based scene point-cloud registration method for robotic spatial awareness in intelligent manufacturing,” by Yusen Wan and Xu Chen, now published in Robotics and Computer-Integrated Manufacturing (Vol. 99, 2026). This publication marks an important step toward enabling robots to achieve high-precision spatial awareness in real-world industrial environments—where accuracy matters most and data is often scarce.
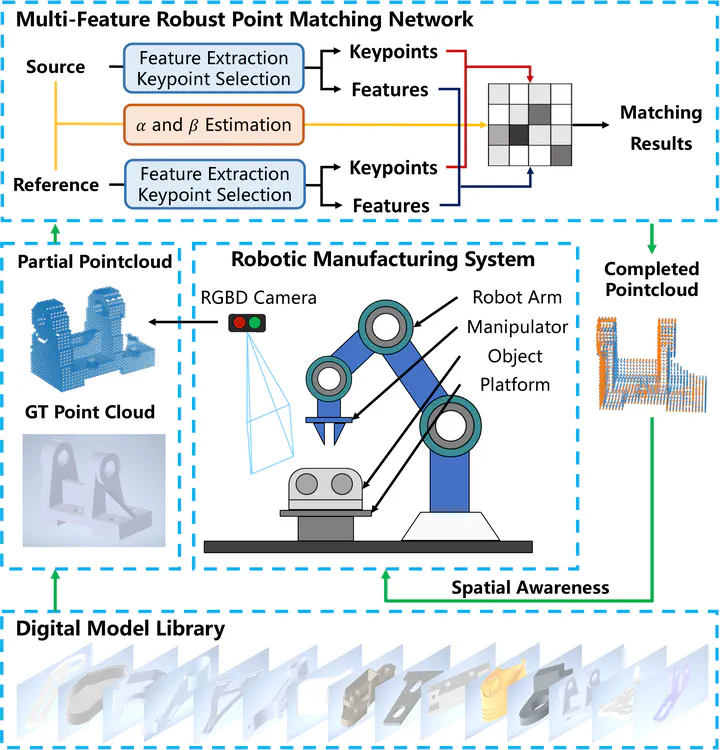
A core challenge in intelligent manufacturing is reliable pose estimation and scene understanding under tight precision requirements. While many existing scene reconstruction methods are designed for general settings with abundant data, manufacturing demands millimeter-level accuracy and typically operates with limited training data. To address this gap, we introduce iLSPR, a Learning-based Scene Point-cloud Registration framework purpose-built for industrial applications. The framework brings together three key innovations:
-
MF-RPMN (a Multi-Feature Robust Point Matching Network): learns from both raw point clouds and deep features to achieve accurate, robust alignment.
-
GPDG (Geometric-Primitive-based Data Generation): efficiently generates high-quality synthetic data for training under data-limited conditions.
-
A digital model library of industrial objects: enabling precise registration of high-fidelity CAD models into observed scenes.


We also introduce the ISOPR (Industrial Scene Object Pointcloud Registration) dataset in IsaacSim to benchmark performance. Extensive experiments show that iLSPR delivers exceptional accuracy in both position and orientation estimation, achieving a 0.004 translational MAE and a 0.297 rotational MAE. This corresponds to 20.0% and 25.2% improvements over leading methods such as RPMNet, setting a new state of the art for industrial scene point-cloud registration. These gains enable more precise, reliable, and deployment-ready digital reconstruction of manufacturing environments, and are further confirmed through successful validation on a real-world robotic manufacturing system.
📄 Paper:
Y. Wan and X. Chen, Robotics and Computer-Integrated Manufacturing, 99:103204 (2026)
https://doi.org/10.1016/j.rcim.2025.103204
📦 Open-Source Dataset:
To support reproducibility and accelerate future research, the dataset is fully open-sourced at
👉 https://github.com/macs-lab/iLSPR-inspection
We invite you to explore the paper, dive into the dataset, and build on this work toward more intelligent, precise, and data-efficient robotic manufacturing systems!