Thanks for visiting! I direct the Autonomous Insect Robotics Laboratory at the University of Washington, which works to advance insect-scale robotics engineering and better understand the capabilities of insects.
How can you create a fully autonomous robot as small as a fly? This is an open challenge because scaling physics makes traditional approaches impractical. My research takes inspiration from insects to overcome this, producing operational insect-scale prototypes.
Robots and animals find niches that exploit their strengths. For example, a giraffe's long neck is cumbersome, but it allows a higher reach than other land animals. Our group is interested in the niches that will be occupied by insect-scale robots, measuring a few centimeters across. Their small size, low weight, agility, and low materials cost have advantages relative to larger robots. For example, they could perform sensing in more confined spaces, operate safely in close proximity to humans, or be deployed where mass is at a premium such as in outer space. But to realize these capabilities requires solving a number of miniaturization challenges. Many conventional robot and aircraft technologies like electromagnetic motors, GPS sensing, gliding flight, and robot navigation algorithms, cannot operate efficiently or effectively at insect scale. This is because dominant physical effects change as scale reduces.
The Autonomous Insect Robotics Laboratory aims to solve these scaling problems by taking inspiration from insects. For example, flies and bees continually flap their wings rather than gliding like birds. This is an adaptation to the greater effect of viscous drag at small scale. More than that, insects have superlative capabilities that operate at the forefront of contemporary control theory, outclassing current robots. Watch as a honeybee navigates to a flower and then deftly lands on it while buffeted by wind. These animals inspire insect robotics that are not only small, but capable of swiftly navigating through complex, uncertain environments.
Basic flight mechanics and simple sensing systems have been demonstrated on insect robot prototypes, but there remain many unsolved problems. In particular, we have not yet performed control computation using tiny onboard microprocessors, added sufficient sensing for complete flight autonomy (no external sensors), and power has so far been supplied by wires.Update: Achievement unlocked! Rivaling the performance of insects remains a distant target. Insects share a similar sensory suite to what our robots will carry, and operate under the same non-intuitive governing physics, so the solutions they employ have direct engineering application. The results of this research will extend beyond insect robots to anywhere there is a need for miniaturized and power-efficient sensing, power-efficient control systems, and more dynamic, robust, and lifelike robots. The effort may also give unique insights into the operation of the brain.
Areas of particular interest are computation-constrained visual navigation, power sources, chemical plume localization, and the interplay of control and mechanics.
Opportunities. Exceptionally-qualified undergraduate or graduate students interested in research at the intersection of robot design, control, and animal locomotion at insect scale are invited to contact Prof. Fuller about opportunties to join the laboratory. Graduate applications are due to the UW Department of Mechanical Engineering (here) in December -- please make sure indicate your interest in the Fuller group. UW students in Aero, EE, and CSE are also invited to contact Prof. Fuller. The group recruits students with previous experience in building physical systems, a passion for robotics, writing experience, and, if possible, previous publications. Securing funding is one of the best ways to improve application competitiveness (resources). Exceptional candidates seeking external postdoctoral fellowships (e.g. McDonnell, WRF) are welcome to contact Prof. Fuller to discuss opportunities. Please include a resume, and optionally a design portfolio, in email correspondence. It may not be possible to respond individually to all requests.
Dec 2019: This year in ME586: Biology-inspired robotics, teams of students will have the option work together to implement biology-inspired control strategies on a palm-sized flying helicopter!
Oct 2018: Welcoming my newborn daughter, Lilian Matilda Fuller, into the world!
April 2018: Congtratulations Melanie Anderson for winning the prestigious NDSEG fellowship!
Feb 2018: Awarded funding from the U Washington Royalty Research fund! "Aerial insect robotics powered by human-safe magnetically-coupled wireless power transfer"
April 2017: Speaking at the ME seminar series (by popular vote of ME faculty!)
March 2017: New paper in Autonomous Robots! Stabilizing air dampers for hovering aerial robotics: design, insect-scale flight tests, and scaling [pdf]
Sept 2015: New course: "Biology-inspired robot control." [announcement]
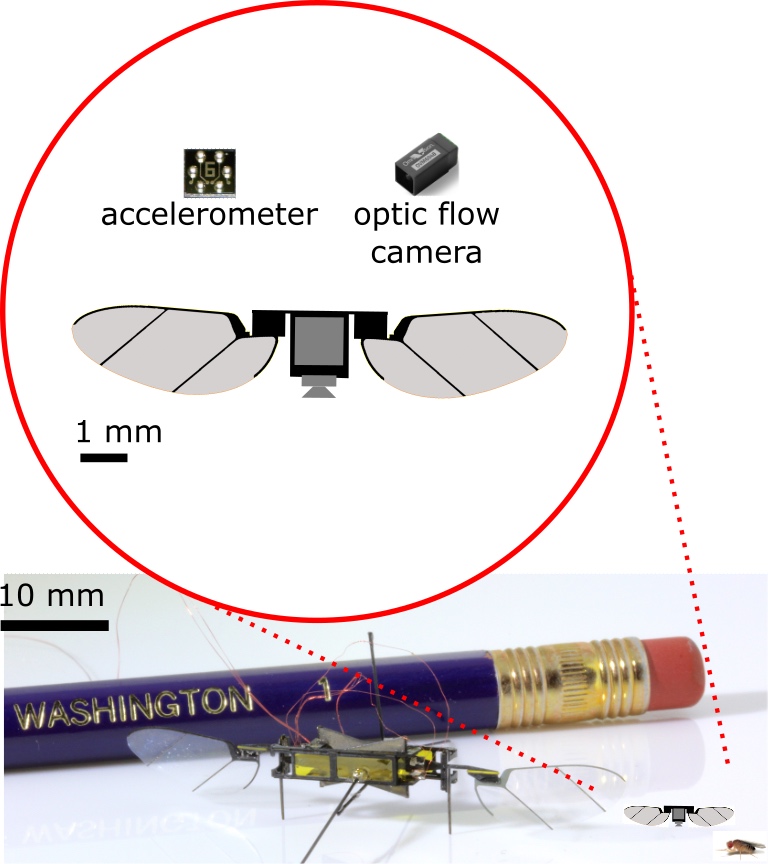
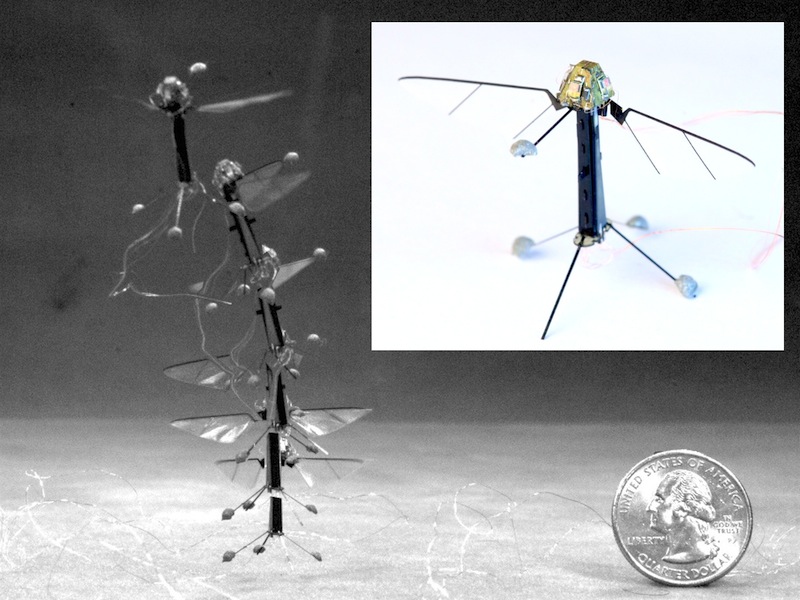
Avionics for a gnat robot Much has been learned about how to actuate insect-sized aerial robots, but their sensor systems have received less attention. To satisfy unusually extreme power and weight constraints, we introduced a new avionics system that eliminates the power-hungry gyroscope ubiquitous in larger drones. Instead, we rely entirely on lighter and more efficient accelerometers and optic flow cameras (inset). Favorable scaling physics of air drag allows for estimating attitude and the wind vector with these sensors on a conceptual robot as light as 10 mg (lighter than a grain of rice), shown next to the 100 mg UW Robofly.
Fuller, Yu, and Talwekar, Science Robotics 2022 [link | Press: IEEE Spectrum, Nature Research Highlight]
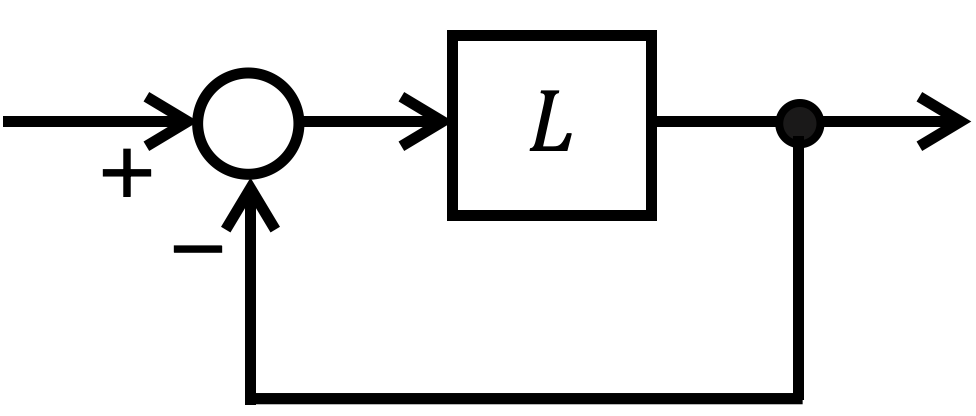
Python Control Systems Library Downloaded nearly 1 million times per year, this is a leading open-source tool for the analysis and design of control systems. It incorporates contributions from around the world.
Fuller, Greiner, Moore, Murray, van Paassen, and Yorke, IEEE Conf. Decision and Control 2021 [PDF | link | project page]
The Smellicopter The first hybrid synthetic-biological aerial robot. The Smellicopter uses the sensitive odor receptors in the antenna of a moth to detect and fly toward odor plumes in the air. In another first, it uses "mechanical intelligence" to steer into the air flow using passive mechancal fins. Anderson, Sullivan, Horiuchi, Fuller, and Daniel, Bioinspiration & Biomimetics 2020 [PDF | video | Press: Wired, Washington Post, Tech Crunch ]
Robofly redesign Presenting the UW Robofly. It consists of a single folded carbon fiber sheet for each actuator unit, which greatly eases fabrication and assembly. Earlier functional designs all required assembling many separate and easy-to-lose parts. We also lowered the center of mass, giving it a new mode of locomotion! In addition to flying, it can use its wings to propel itself across the ground and on the surface of the water! Chukewad, James, and Fuller, IEEE Trans. Robot 2021 [PDF | video ]
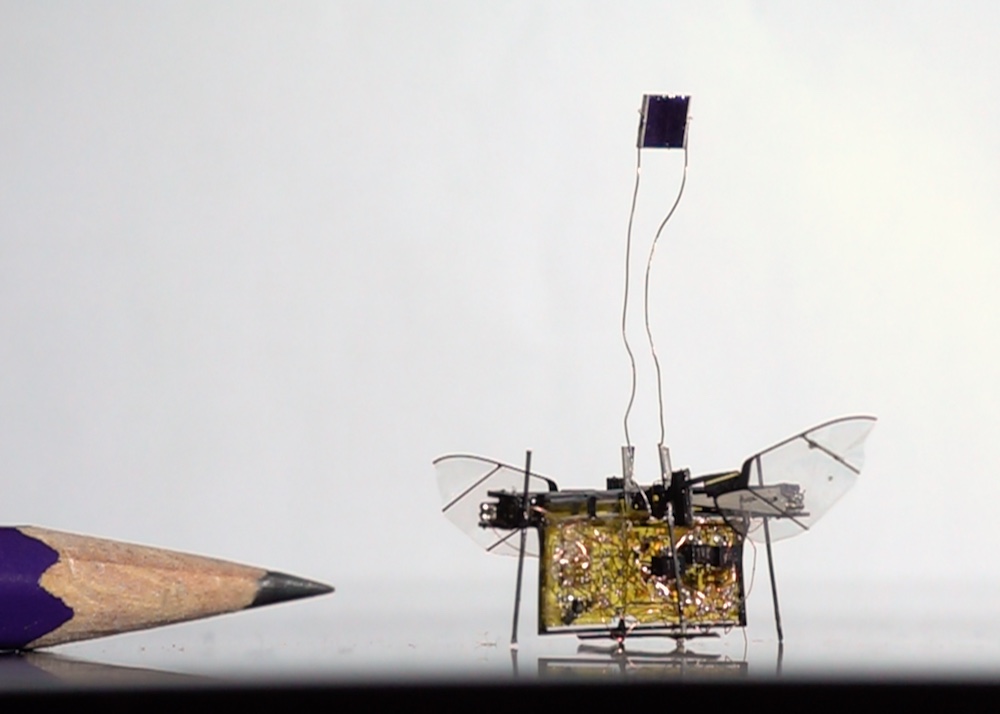
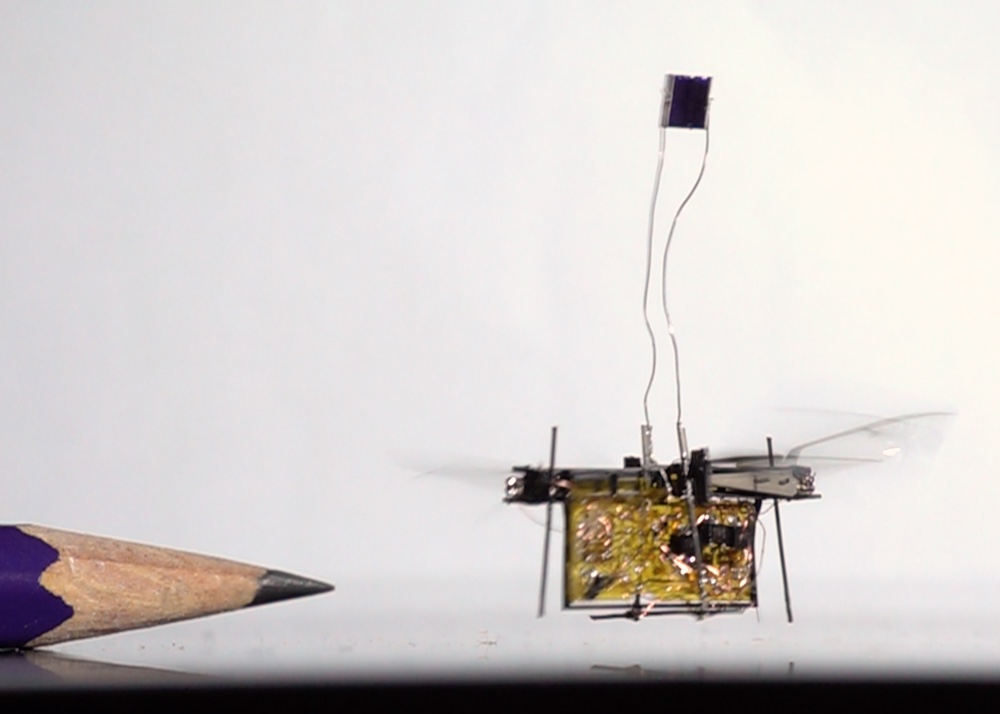
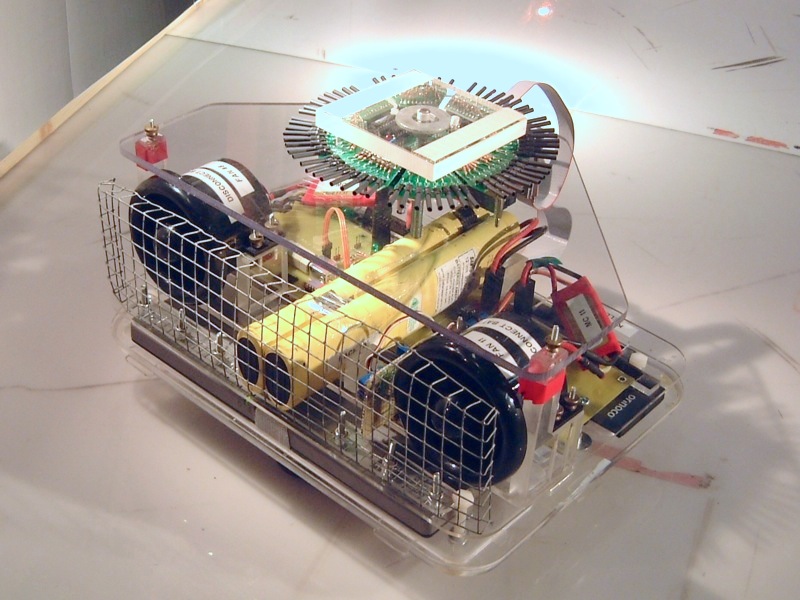
The first wireless fly-sized drone We built the world's first fly-sized drone that does not need a wire from the ground to supply power and control signals. This is a challenge because of the difficulty of miniaturizing the circuitry to drive the robot's high-voltage piezo actuators. We invented a new way to quickly make an ultra-light voltage step-up circuit and incorporated the first microprocessor brain on-board, creating a wireless robot that weighs a little more than a toothpick. We provided power using an infrared laser beam. more James, Iyer, Chukewad, Gollakota, and Fuller, ICRA 2018 [PDF | Press:
WiredEconomistIEEE SpectrumPop SciKIRO 7 News]
Using insect-inspired vision to fly We mounted a four-pixel sensor inspired by insect ocelli to the top of a fly-sized flying robot. This enabled the first flights at this scale stabilized using feedback only from sensors carried onboard. Without this sensor, the robot quickly tumbles because of dynamic instability. Fuller, Karpelson, Censi, Ma, and Wood, J. Royal Society Interface, June 2014. [PDF | video | Press: The ScientistMotherboardScience News]
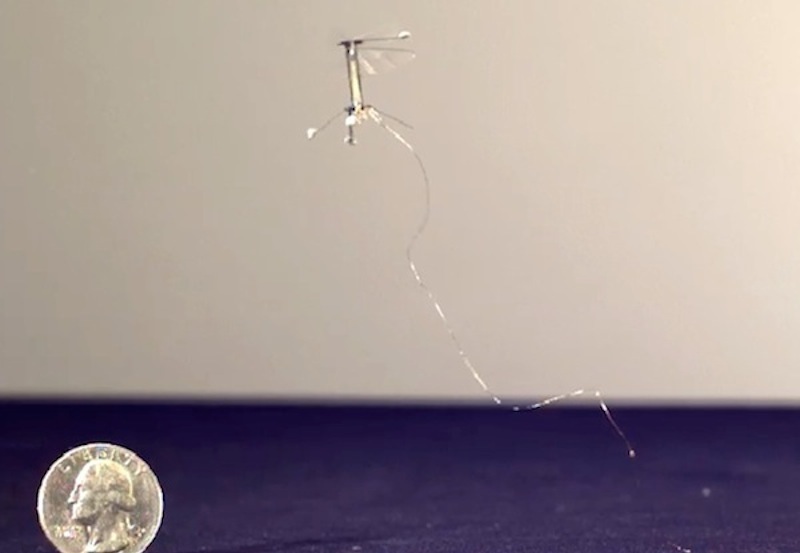
Free-flight of a fly-sized robot As aircraft scale diminishes to that of insects, new effects begin to dominate because of scaling physics. We developed unconventional, scale-appropriate fabrication, aerodynamics, actuation, and control technology to realize the first controlled flight of a vehicle the size of a fly. Ma, Chirarattananon, Fuller, and Wood, Science, May 2013. [pdf,SI |
video | Press: WiredNew York TimesEconomist]
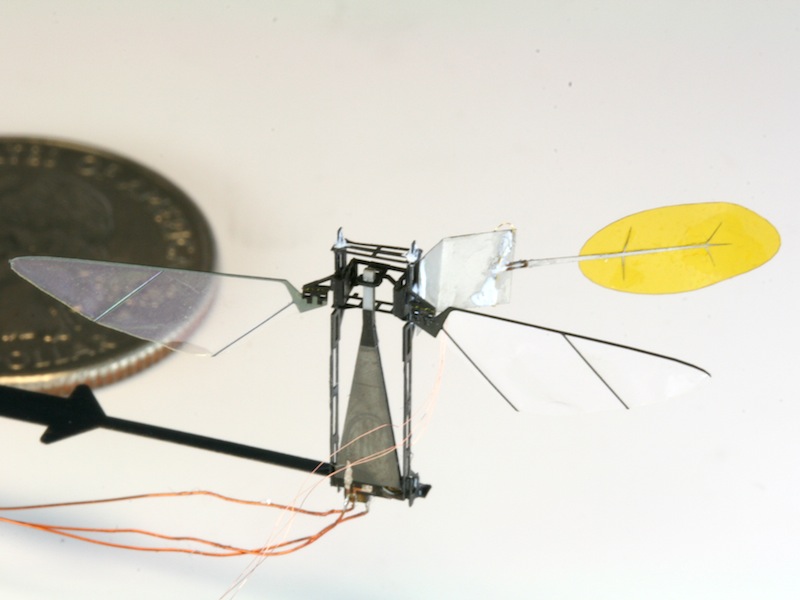
Biomimetic wind sensing A flight-weight sensor (yellow appendage at right) measures airspeed on a fly-sized flapping-wing robot, with Andreas Haggerty. Fuller, Sands, Haggerty, Karpelson, Ma, and Wood, Int. Conf. on Robotics and Automation, 2013. [PDF]
Computation-limited visual motion control Without GPS, tiny aerial vehicles will use vision to navigate confined spaces. Yet vision is typically computation intensive. We showed how a hovercraft robot can visually navigate a narrow corridor using only 20,000 multiply operations per second, compatible with the 10 mW avionics power budget of a fly-sized robot. Fuller and Murray, Int. Conf. on Robotics and Biomimetics, 2011. [PDF | video]
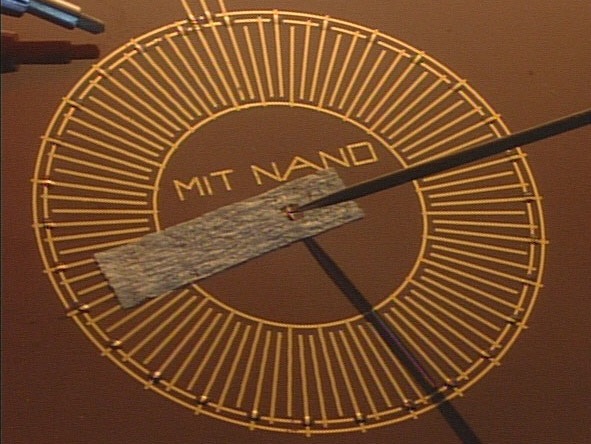
Ink-jet fabricated micro-machines I developed the first ink-jet printer capable of building metal machines. Using a nanoparticle ink, I printed electrostatic motors (above, tip of a mechanical pencil shown for scale), cantilever actuators with hundreds of layers, and a high-conductivity resonant electric coil. Fuller, Wilhelm, and Jacobson, J. Micro-electromechanical Systems, 2002.
[PDF | video | Press: MIT Technology Review (cover)]


{kind=link}
{kind=link}