
SIMUW 2021
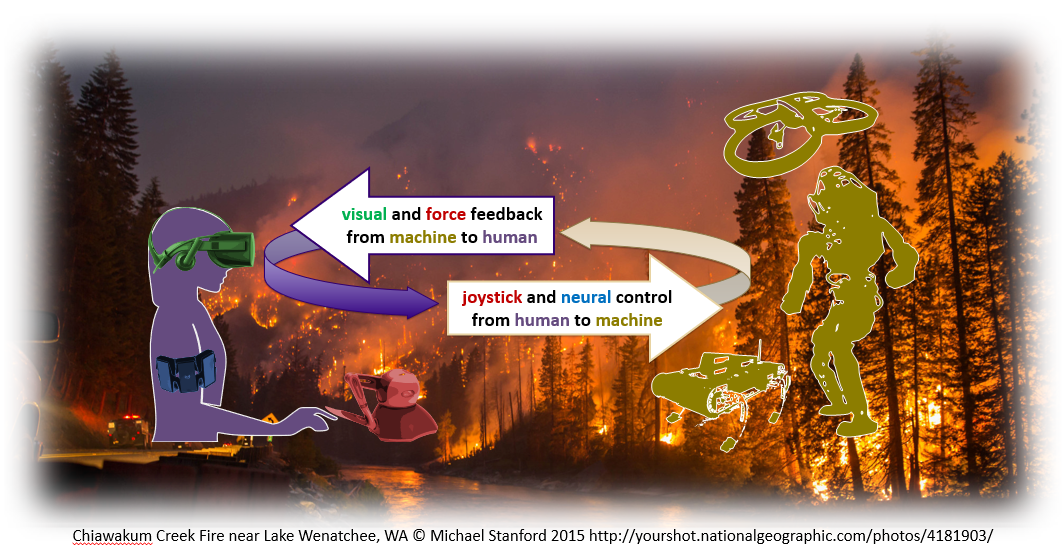
Control theory with humans “in the loop”
Planes assist pilots, cars assist drivers and robots assist surgeons. Human interaction with the physical world is increasingly mediated by intelligent machines that learn from and adapt to their human partners and environments. Our research focuses on the dynamics of human/machine interaction, with an emphasis on human-in-the-loop control of robots and assistive devices.
play the trajectory-tracking game
meet the team

Prof Sam Burden
earned his BS with Honors in Electrical Engineering from the University of Washington in Seattle in 2008. He earned his PhD in Electrical Engineering and Computer Sciences from the University of California in Berkeley in 2014, where he subsequently spent one year as a Postdoctoral Scholar. In 2015, he returned to UW EE (now ECE) as an Assistant Professor. Sam is broadly interested in discovering and formalizing principles of sensorimotor control.
links:
website
bio
papers
talks
Momona Yamagami graduated magna cum laude from Rice University with a BS in Bioengineering in 2016. She is a PhD student in UW ECE, and is co-advised by Professor Kat Steele in the mechanical engineering department. She is interested in understanding movement impairment and improving rehabilitative technology for people with neurologic injury.

Ben Chasnov
received his BS in Engineering from Harvey Mudd College in 2016. His research interests include control theory, robotics and machine learning. In particular, his current research focuses on deep reinforcement learning for control of cyber-physical systems.
links:
website
watch videos
view presentations
| title | venue |
|---|---|
| Control theory with humans “in the loop” (slides) (notes) | University of Washington MathDay, Seattle, WA, USA, 2021 |
| Toward telelocomotion: human sensorimotor control of contact-rich robot dynamics | Robotics Institute Seminar, Carnegie Mellon University, Pittsburgh, PA, USA, Jan 2020 Controls Seminar, University of Michigan, Ann Arbor, MI, USA, October 2019 Neuroscience and Robotics Seminar, Northwestern University, Evanston, IL, USA, March 2019 Robotics Seminar, California Institute of Technology, Pasadena, CA, USA, March 2019 NVIDIA Robotics Research Lab, Seattle, WA, USA, April 2019 |
| Humans & Robots | University of Washington MathDay, Seattle, WA, USA, 2016, 2017, 2018 |
read papers
| [16] | M. Yamagami, L. N. Peterson, D. Howell, E. Roth, and S. A. Burden. Effect of handedness on learned controllers and sensorimotor noise during trajectory-tracking. bioRxiv, July 2020. [ bib | DOI ] |
| [15] | S. A. Burden, T. Libby, and S. D. Coogan. On infinitesimal contraction analysis for hybrid systems. Nov. 2018, arXiv:1811.03956. [ bib | arXiv ] |
| [14] | M. M. Madduri, S. A. Burden, and A. L. Orsborn. A game-theoretic model for co-adaptive brain-machine interfaces. IEEE Conference on Neural Engineering (NER), May 2021. [ bib | DOI ] |
| [13] | B. Chasnov, D. Calderone, B. Açikmeşe, S. A. Burden, and L. J. Ratliff. Stability of gradient learning dynamics in continuous games: Scalar action spaces. IEEE Conference on Decision and Control (CDC), Dec. 2020. [ bib ] |
| [12] | M. Yamagami, K. M. Steele, and S. A. Burden. Decoding intent with control theory: Comparing muscle versus manual interface performance. ACM Conference on Human Factors in Computing Systems (CHI) pp. 1--12, Apr. 2020. [ bib | DOI | .pdf ] |
| [11] | B. S. Banjanin and S. A. Burden. Nonsmooth optimal value and policy functions in mechanical systems subject to unilateral constraints. IEEE Control Systems Letters (L-CSS) 4(2):506--511, Apr. 2020. [ bib | DOI | .pdf ] |
| [10] | B. Chasnov, L. J. Ratliff, E. Mazumdar, and S. A. Burden. Convergence guarantees for gradient-based learning in continuous games. Conference on Uncertainty in Artificial Intelligence (UAI), May 2019, arXiv:1905.09169. [ bib | arXiv | .pdf ] |
| [9] | B. Chasnov, L. J. Ratliff, D. Calderone, E. Mazumdar, and S. A. Burden. Finite-time convergence of gradient-based learning in continuous games. AAAI-19 Workshop on Reinforcement Learning in Games, Jan. 2019. [ bib | .pdf ] |
| [8] | B. Chasnov, M. Yamagami, B. Parsa, L. J. Ratliff, and S. A. Burden. Experiments with sensorimotor games in dynamic human/machine interaction. Micro- and Nanotechnology Sensors, Systems, and Applications XI, vol. 10982, p. 109822A. International Society for Optics and Photonics, 2019. [ bib | DOI | .pdf ] |
| [7] | M. Yamagami, D. B. Howell, E. Roth, and S. A. Burden. Contributions of feedforward and feedback control in a manual trajectory--tracking task. IFAC Conference on Cyber--Physical--Human Systems (CPHS), 2018. [ bib | DOI | .pdf ] |
| [6] | E. Roth, D. Howell, C. Beckwith, and S. A. Burden. Toward experimental validation of a model for human sensorimotor learning and control in teleoperation. SPIE Defense + Security, pp. 101941X--101941X--12. International Society for Optics and Photonics, May 2017. [ bib | DOI | .pdf ] |
| [5] | A. M. Pace and S. A. Burden. Decoupled limbs yield differentiable trajectory outcomes through intermittent contact in locomotion and manipulation. IEEE International Conference on Robotics and Automation (ICRA), pp. 2261--2266, May 2017. [ bib | DOI | .pdf ] |
| [4] | A. M. Pace and S. A. Burden. Piecewise--differentiable trajectory outcomes in mechanical systems subject to unilateral constraints. Hybrid Systems: Computation and Control (HSCC), pp. 243--252. ACM, HSCC '17, 2017. [ bib | DOI | .pdf ] |
| [3] | W. D. Nothwang, R. M. Robinson, S. A. Burden, M. J. McCourt, and J. W. Curtis. The human should be part of the control loop? Proceedings of IEEE Resilience Week, 2016. [ bib | .pdf ] |
| [2] | R. Robinson, D. R. R. Scobee, S. A. Burden, and S. S. Sastry. Dynamic Inverse Models in Human-Cyber-Physical Systems. Proceedings of the SPIE Conference on Micro-Nanotechnology Sensors, Systems, and Applications, no. 9836-68, 2016. [ bib | DOI | .pdf ] |
| [1] | A. M. Bestick, S. A. Burden, G. Willits, N. Naikal, S. S. Sastry, and R. Bajcsy. Personalized kinematics for human-robot collaborative manipulation. Proceedings of the IEEE International Conference on Intelligent Robots and Systems (IROS), pp. 1037--1044, 2015. [ bib | DOI | .pdf ] |