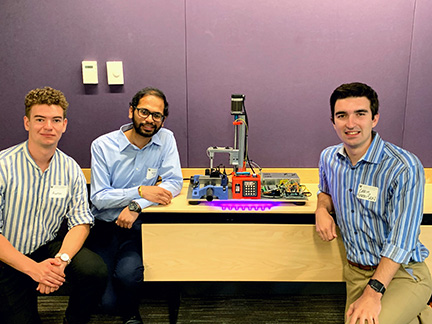
Connor Hughes, Kaiyu Shi, Karli Berger, Khrisna Kamarga, Kyle Schultz and Willie Shih
with help from Microsoft, developed a humanoid
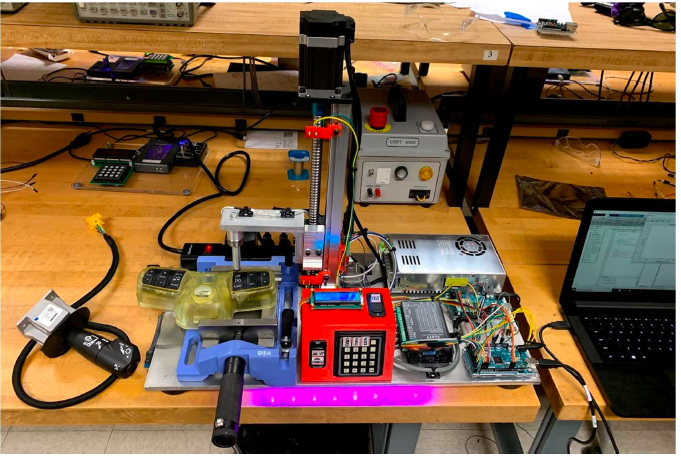
‘test rig’ for testing new eye trackers, that accurately projects its gaze onto a specified point on a screen . The operator of the test rig can provide it with a set of screen coordinates that represent a desired path for the robot’s gaze, along with information about the timing and speed of the desired gaze motion, and the test rig should respond appropriately. In doing so, the test rig must also be able to match human performance metrics.
This project was part of ME495 (Mechatronics) Capstone Design Projects,
SPRING 2019.
Team Photo
Test Video
Designed System
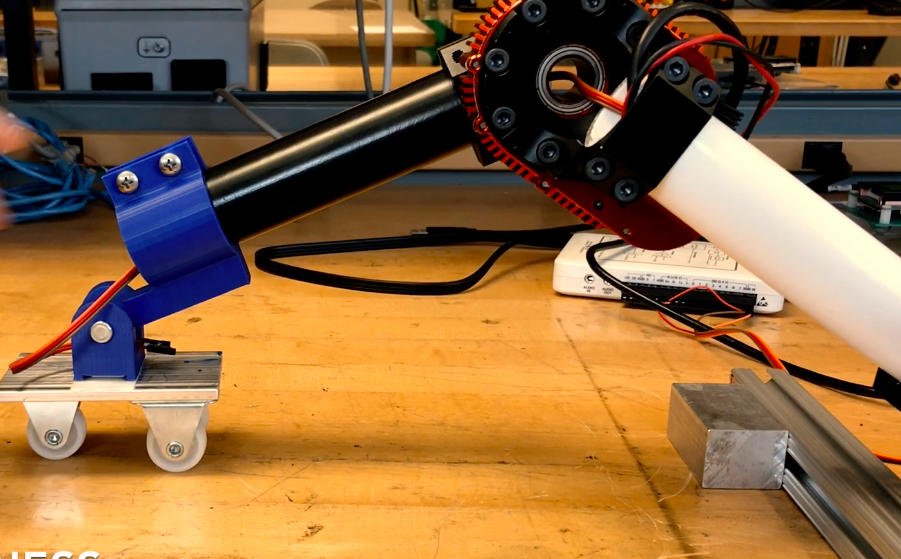
Impedance-Controlled SEA Arm
Nicholas Splinter,
Saad Almuhanna, and
Wade Marquette
designed an impedance controller for robot interactions.
Typical robots employ position or velocity control which results in a high stiffness output robot where
maximum actuator torques will be utilized to move between positions. Due to the high stiffness, limiting
and controlling force output is difficult. Contacting the surroundings with typical position-controlled
systems imposes danger, as any disturbance will only increase end effector force. Through the use of
series elastic actuators (SEAs) and impedance control, a compliant robot that can control the force ineractions
while maintaining the desired position was implemented.
This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2019.
Team Photo
Designed System
Preliminary-Test Video
Operation Video
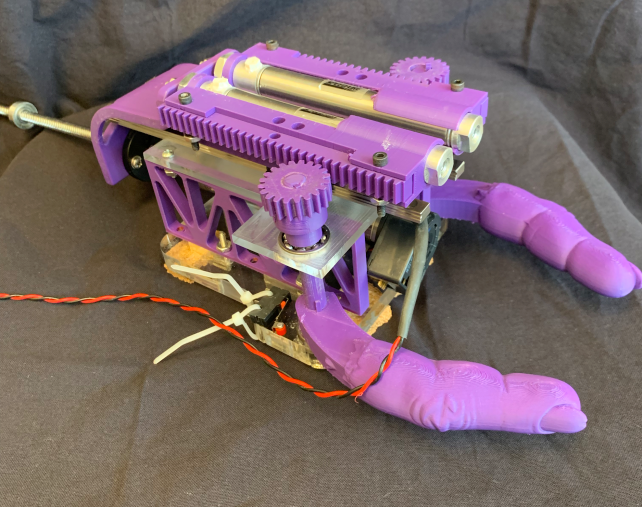
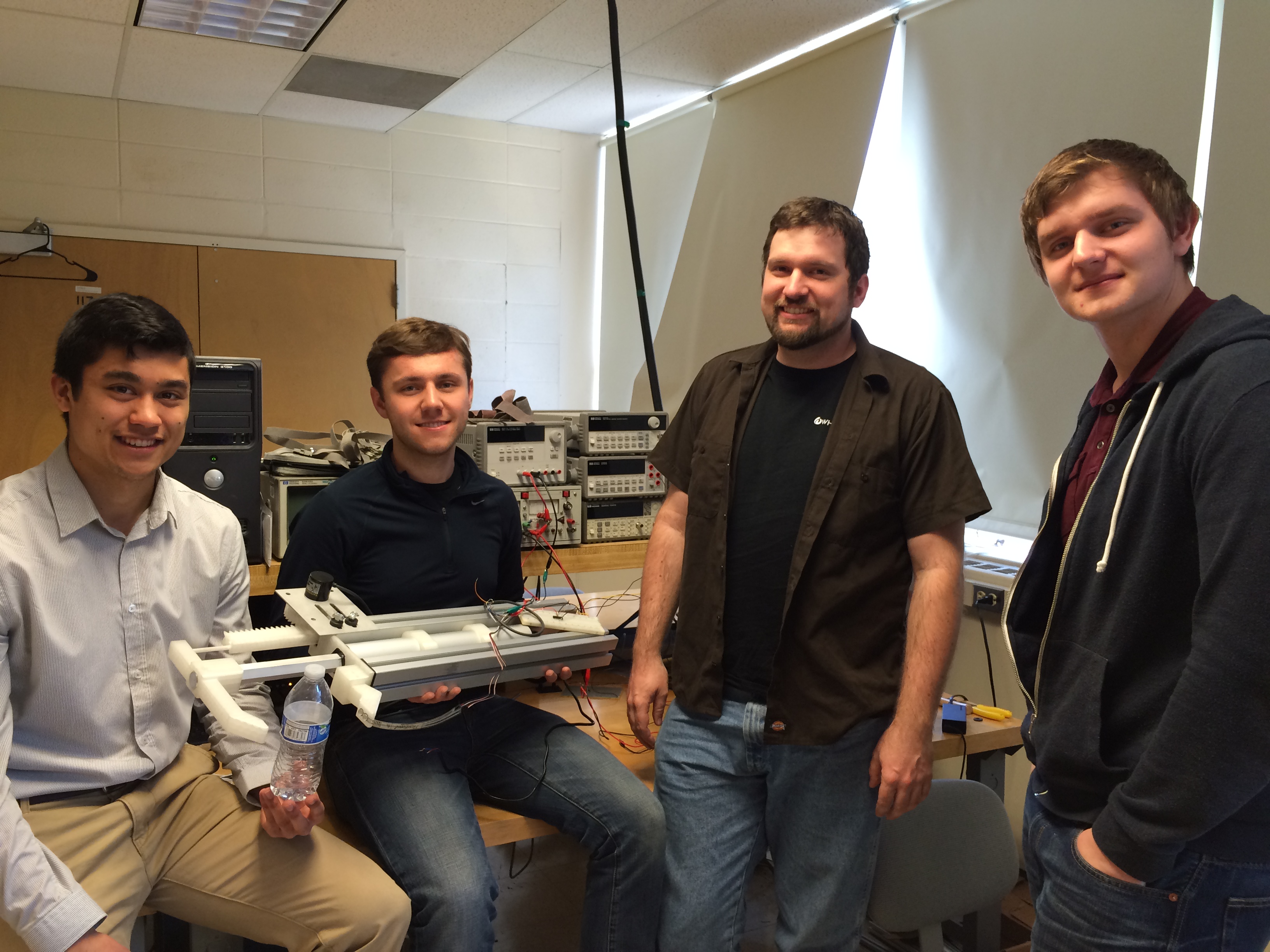
Variable Impedance Robotic Gripper
Will Hwang,
Ewurama Karikari,
Benjamin Wong, and
Mianzhi Zhou
designed, built and evaluated
a variable impedance robotic gripper that increases
stiffness with increasing force. The gripper was be able to grip fragile objects (low force, low stiffness) as well as denser, heavier objects (high force, high stiffness). A passive robotic gripper with linear stiffness-force relationship was developed using only one actuator.
This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2019.
Team Photo
Designed System
Preliminary-Test Video
Operation Video
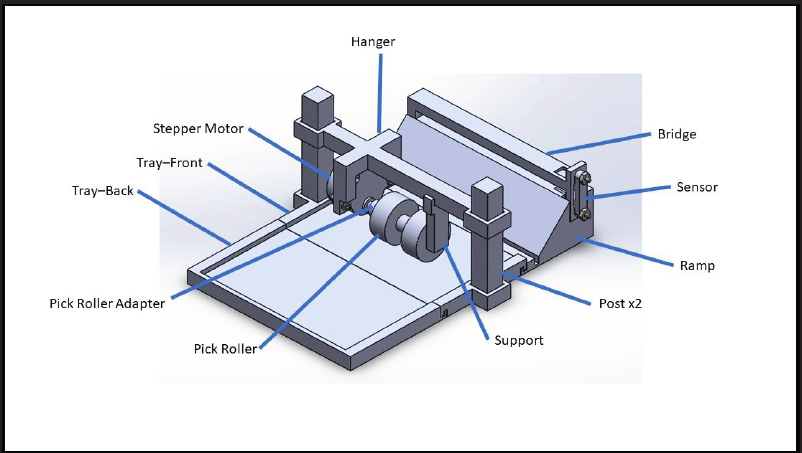
Mistake-Proof Decal Placement
Jeffrey Jacobsen and Christian Bertram
aimed to reduce mistakes in decal placement at Genie Industries. A two-part solution was developed: an image verification system (IBVS) as a final check to verify all decals are accounted for before units leave the plant, and a decal vending machine (DVM) to ensure that the technicians received the correct decals and correct quantity of decals to place on the units.
This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2019.
Team Photo
Designed System
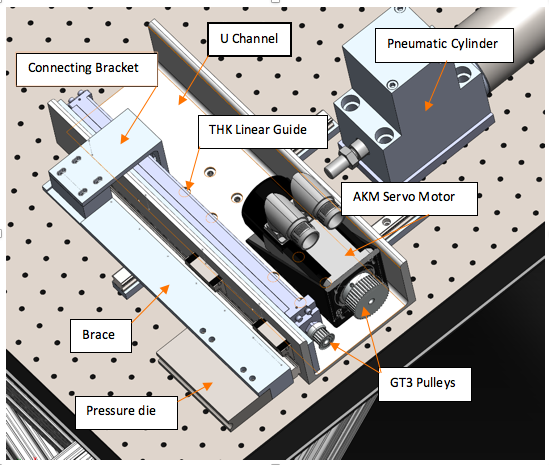
Precision-Tube Bending
Christopher Woodruff, Lukas Wavrin, Cathy Lee, Nikolai Warner and Andrew Wu
designed, built and evaluated a rotary draw bender that is capable of automatically bending tubing to with a high precision in the achieved bend angle. A secondary goal was to design and implement a vision-based system to inspect the final bend angle.
This project was part of ME495 (Mechatronics) Capstone Design Projects through the
Boeing Avanced Research Center,
SPRING 2019.
Team Photo
Designed System
Test Video
Haptics Calibration System
Aaron Kitchener, Krishna Teja, and
Chris Harrison
designed, built and evaluated a test rig that is capable of evaluating the force-displacement curves for many different types of switches used in PACCAR truck fleet. The goal was to help standardize the haptic feel of the swithches. Besides providing operators with a
pleasant user experience, having a standardized feel
can helps improve driver safety by reducing
the number of accidental switch presses.
This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2019.
Team Photo
Designed System
Test Video
Drag Reduction System
Andrew Gaard, Robby Pershing, Matthew Lemelin, Jesse Castleberry designed, built and evaluated a
Drag Reduction System to control the longitudinal aerodynamic force balance on a Formula SAE car.
This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2019.
Team Photo
Designed System
Preliminary-Test Video
Operation Video
Force Feedback Haptic Grabbing Device
Andre Stone, Veniamin Stryzheus, Ethan Sherrard and Veniamin Tereshchuk created a device capable of amplifying or attenuating the grasping motion in a human hand. This device included force feedback, allowing the user to “feel” the item in the remote device. This type of device is useful in applications such as robotic assisted manufacturing, working in hazardous or dangerous environments, and remote telepresence. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2015. They won the Best Project in Mechatronics Capstone 2015 (First Prize).
Team Photo
Operation Video
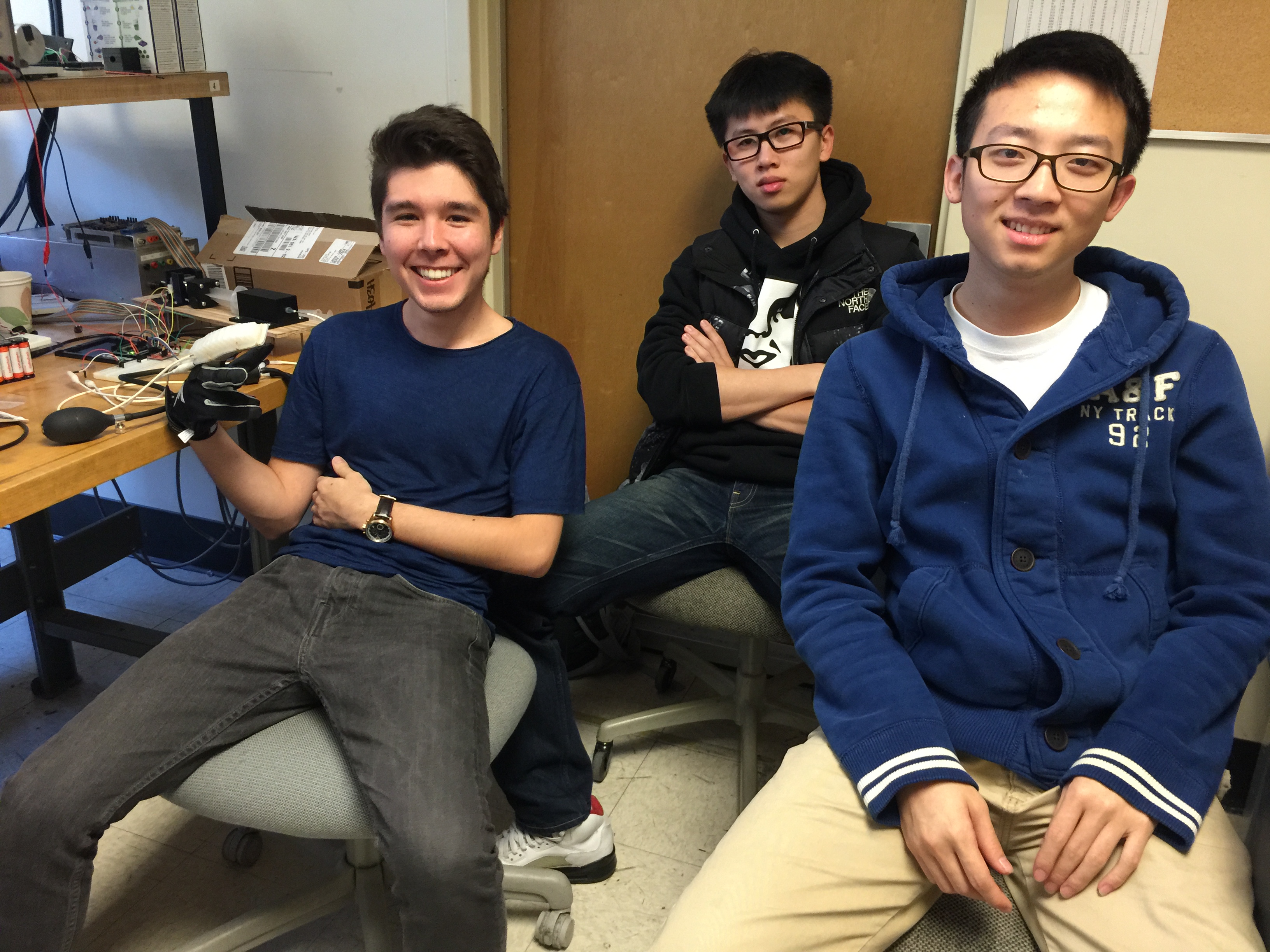
Robot Rehabilitation with Soft Actuators
Duncan Drummond, Pei Jei, and Ziyi Feng build a glove retrofitted with a soft actuator in order to bend a finger in a controlled manner. Finger angle was measured using a bend sensor. This device was made and designed with inexpensive open source hardware and software, making DIY finger rehabilitation a reality. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2015. They won the Best Project in Mechatronics Capstone 2015 (Second Prize).
Team Photo
Operation Video
Shelf Sweeping Robot
David Foudls, Kalsi Kwan, Tysen Mulder, and Ryan Scuderi built a robot aimed at the Amazon Picking Challenge. This robot is capable of scanning a row of separated shelves, and emptying contents it finds into a bin. The item detection was accomplished with an infrared sensor, and the robot sweeps the shelf with an extendable arm with a rotating paddle. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2015.
Team Photo
Operation Video
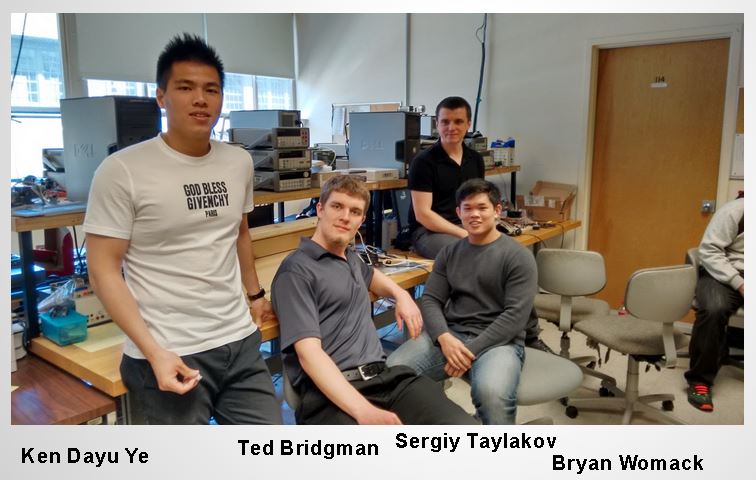
Obstructed Position Sensing and Tracking
Dayu Ye, Theodore Bridgeman, Sergiy Taylakov and Bryan Womack designed and crafted a device that can track an object without direct visibility by using an ultrasonic sensor. The application for this is for airplane wing manufacturing and inspection. By communicating with a sensor on the outside of the wing, a camera can be used to track and view the same location internal to the wing, without direct viewing access. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2015.
Team Photo
Operation Video
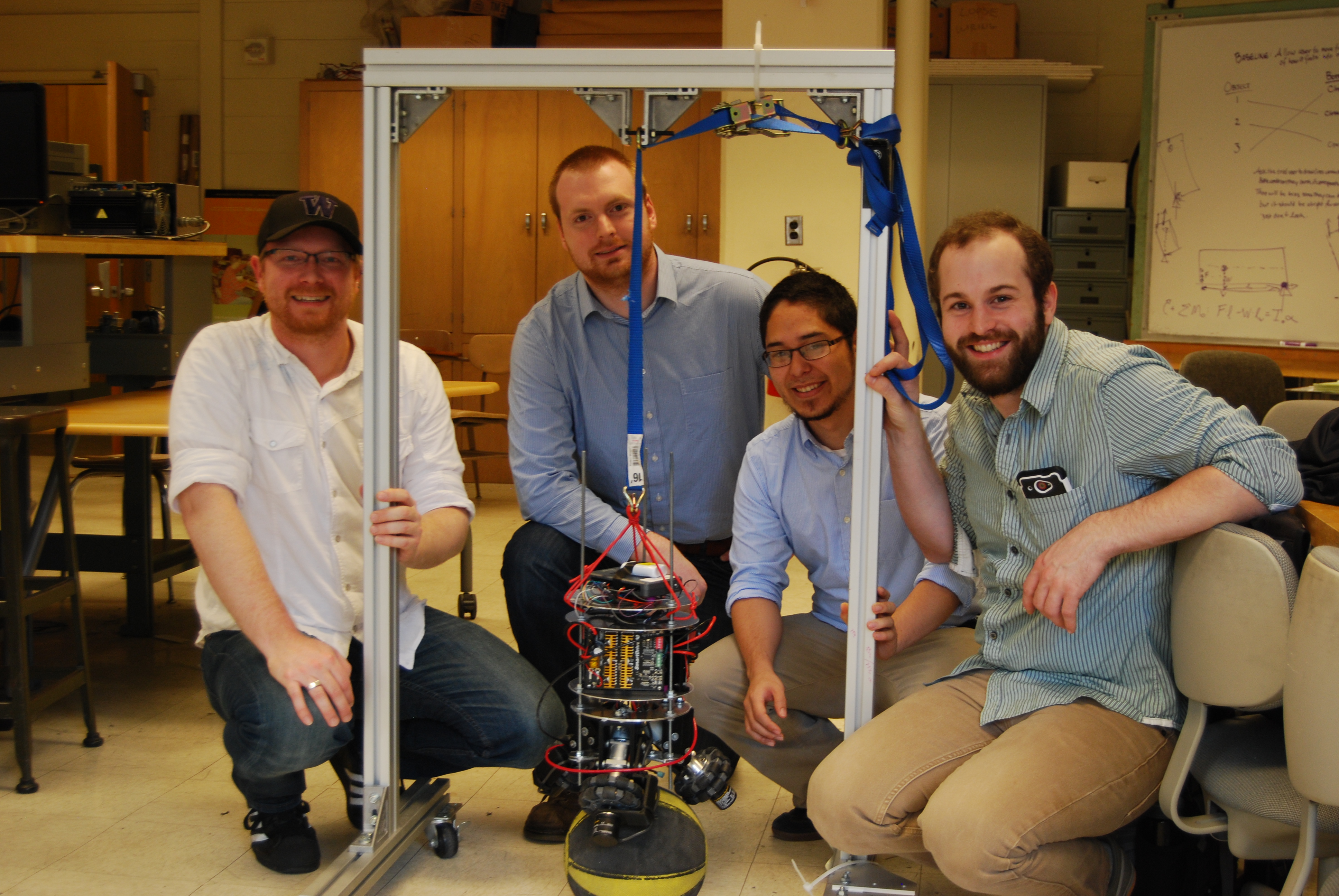
Mo-ball bot
Brenden Buchanan, Michael Burge, Zachary Sakoi and Corey Crisp created a robot capable of balancing on a ball. The was designed to be used for advanced mobility, as an improvement to the standard wheel chair. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2015.
Team Photo
Operation Video
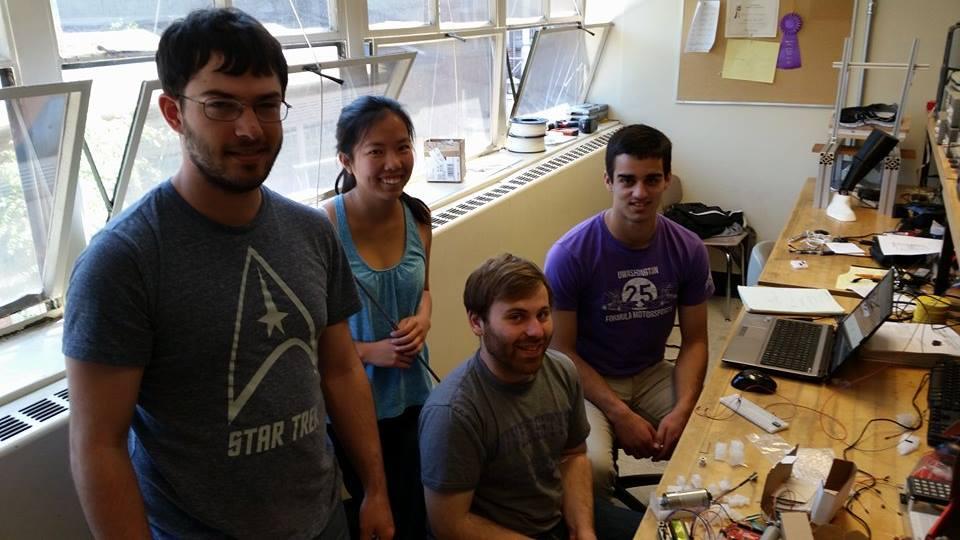
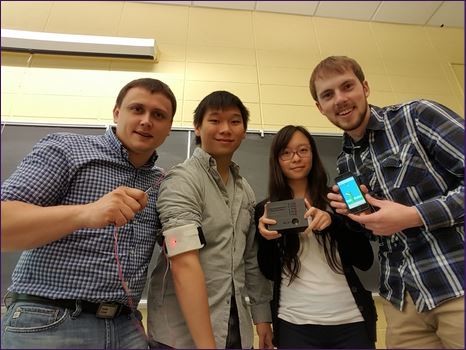
Electromyography Controlled Game
Vladimir Zuyev, Michael Ng, Cheryl Tan and Ryan Pyke created an EMG sensing armband, and used this as a controller for an LED game. This technology can be used to encourage more active game playing, which could increase blood flow and other health benefits related to exercise. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2015.
Team Photo
Operation Video
Torque Responsive Ankle Brace
Shuyu Xia, Joe Matheson, Matt Yoshihara and Tyler Barron designed a variable stiffness ankle brace. The goal behind this brace is to be flexible under normal operation, and activate when there is risk of injury to the ankle. This was accomplished by modifying an existing brace, and adding a wire and spring, which activate at a prescribed joint angle. Along the with ankle, the team built a data collection system to capture test data. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2015.
Team Photo
Biomimetic Cilia
High-school students Wei-Chen Wang and Ben Philips designed an electromagneticaly actuated cilia to enable mixing using cilia resonance as part of their summer research project in 2013.
Team Photo working on their circuit
Final Tests
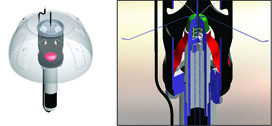
Active Prosthesis Metatarsal Joint
Kyle Butler, Ryan Jordan, Lukas Barlas, Nick Elgin, and Kurt Stalsberg
designed a prosthetic foot was an active metatarsal joint.
The goal was to develop an affordable prosthetic foot that would help amputees have a more natural gait when compared to other prosthetics on the market today.
The prosthetic foot had a variable resistance toe connected at the metatarsal joint. When an amputee walks, the toe bends allowing them to roll off much like a non-amputee. Also, during swing phase, the toe remains locked in place to allow for more ground clearance and will release on heel strike.
This group worked with support from the Veterans Affairs (VA) Puget Sound Hospital to build and test this prototype.
This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2013.
They were awarded the Best ME Department Capstone Project Award for 2013.
Team Photo
Operation Video
Final Tests
Filament Extruder for 3D Printers
Maximum Rosencrantz, Sydney Dahl, Saeed Aliakbari,
Michael Han and Matt Rogge
designed, constructed and evaluated a
small-scale extruder for the production of filament for use in 3D printers.
The achieved rate of extrusion represents a
greater than tenfold increase over other small-scale
filament extruders currently available.
This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2013.
Team Photo
Schematic Model
Final Demonstration
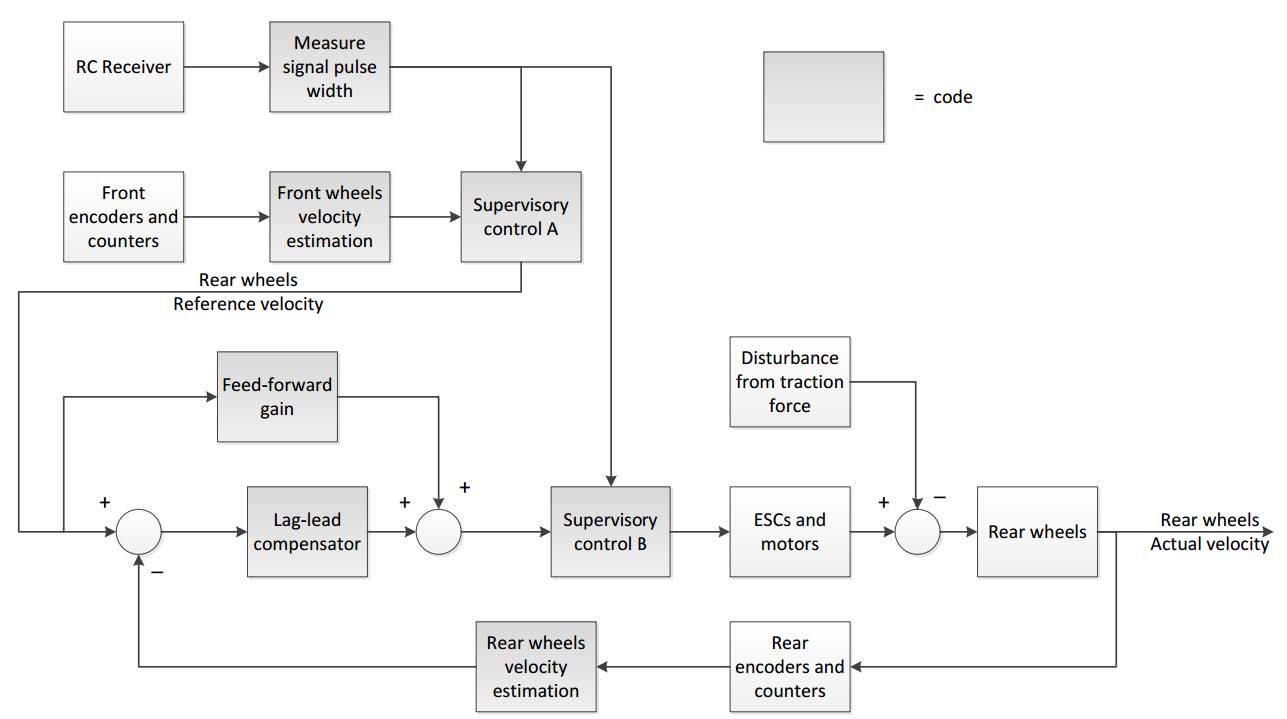
Traction Control
Leslie Mikolaizik, Eben Kiehl, Andrew Countryman,
Jacob Woodland and Thomas Larson
implemented traction control for a dual motor electric car using velocity feedback velocity control for the motors.
Traction control helps to limit the amount of tire slip that can occur in a vehicle under low friction or high acceleration conditions.
This allows for better handling, faster cornering, and a safer vehicle.
This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2013.
Team Photo
Traction Control System
Final Demonstration
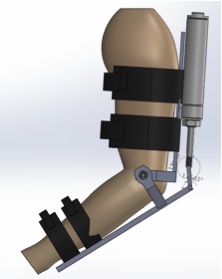
Team Exotherapy
James Ingersoll, Ryan Stull and Joshua Wilke
designed and built a single joint exoskeleton arm, which could be used as an assistive elbow brace.
The exoskeleton arm senses the user's intent through an electromyography (EMG) sensor, which read the electrical signals given off by a person's muscles and neurons. The signal from the EMG sensors is then conditioned through an analog circuit and a microprocessor. The exoskeleton arm is then actuated by a pneumatic cylinder. Control of the pressure of the pneumatic cylinder was through a proportional valve, which is controlled by the conditioned EMG signal. A challenge is to process the measured signal to estimate the user intent and appropriately control the arm.
This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2013.
Team Photo
System Schematic
Final Demonstration
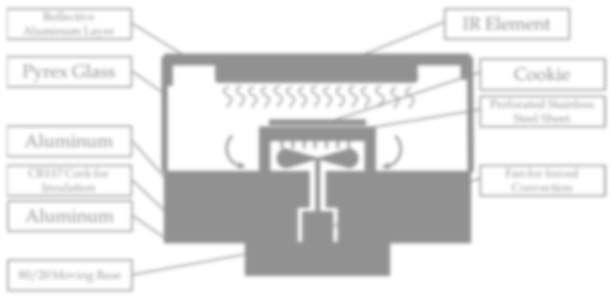
Cookie-Bot
Nicholas Wright, Jeremy Ridge, Seymareh Roomiany, John D'Angelo, and
Laura van Kolck
created a prototype machine to print a user specified design on cookie dough and then subsequently bake the cookie, all as an automated process. The challenge is to
optimally bake the cookies so that they appear golden brown on the outside and are thoroughly cooked on the top, bottom, and center --- and to be slightly chewy, but not crunchy.
This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2013.
Team Photo
Schematic of Oven System
Final Demonstration
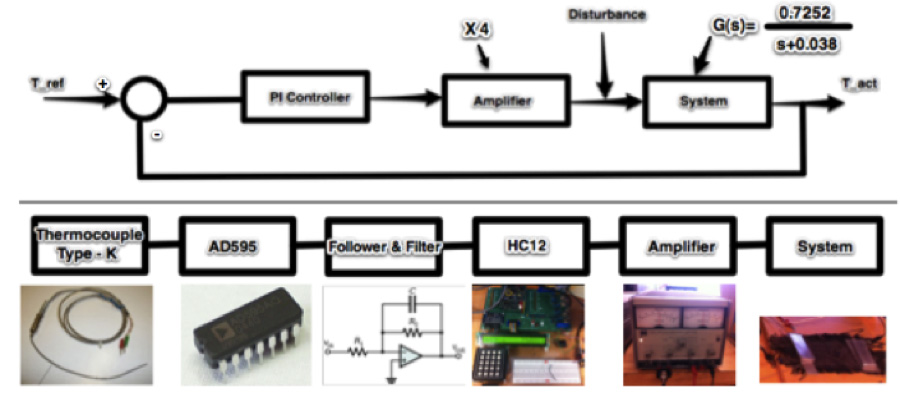
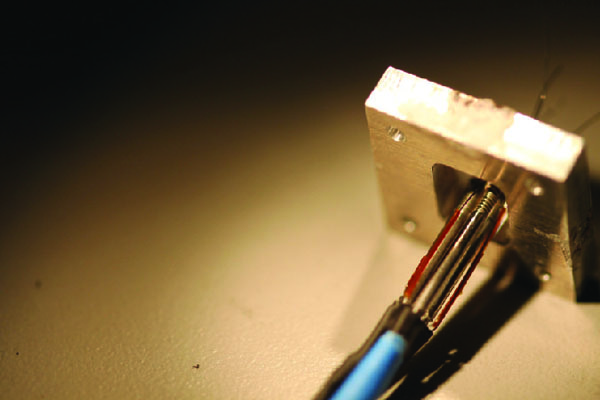
Active Heat Control for Composite Repairs
ZhaoHui Fang, HoLung Chow and Jiarong Huang designed a heating system using carbon fiber that could be used for composite repairs. The main challenge is to achieve uniform heating in the system. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2013.
Team Photo
Feedback Scheme
Final Demonstration
Biomimetic Jellyfish Group
Ryan Warnock, Matthew Burkhardt, Stephen Kreiger and Kara Wilder designed a Jelly Fish. The main challenge was to operate the system in water, with similar beat patterns and dimensions as a Jellyfish. They used an SMA actuator to reduce weight and provide sufficient force to move the system through water. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2011.
Team Photo
Prototype
Final Demonstration
Solar Tracker
Valerie Chun, Charisse Lewis, Stephan Favilla and Megan Mamiya designed a solar tracker. The main challenge was to reduce the amount of energy needed for the tracking. They used pre-computed trajectories (based on latitude and longitude) to control stepper motors for the tracking. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2011.
Team Photo
Prototype
Final Demonstration
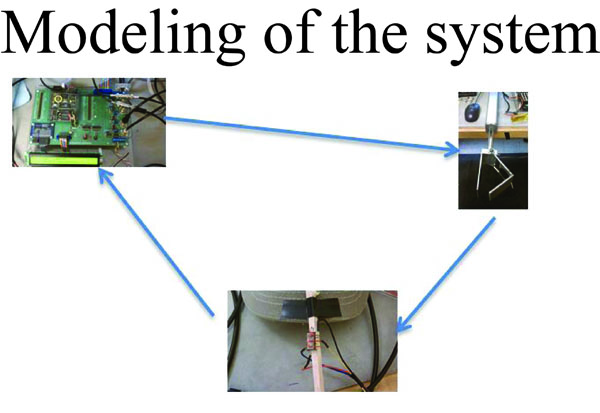
Head-Movement Actuated Robotic Arm
Adrian Haruta, Yong Park and Hyowon Jung designed a human interface to control a robotic arm. The main challenge was to enable intuitive control of the robotic arm. They used a tilt sensor on a cap to provide inputs to the robotic arm. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2011.
Team Photo
Prototype
Final Demonstration
Dynamic Flight Control
Steven Chukri, George Hoffman, Grant Boursaw and Benjamin Culver designed a feedback system for flight control. The main challenges wereto manage the large friction in the motors, and substantial noise in the sensors. They successfully designed, implemented and tested a prototype using a pulse-modulated control of the elevators. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2011.
Team Photo
Prototype
Final Demonstration
Shape Memory Alloy Electronic Braille
Tim Campbell, Shota Pearce, and Nick Smith designed an electronic braille reader. The main challenge was to reduce the footprint of the actuator to the same size of that of a Braille pin. They successfully designed, implemented and tested a prototype using SMA actuators. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2011.
Team Photo
Prototype
Final Demonstration
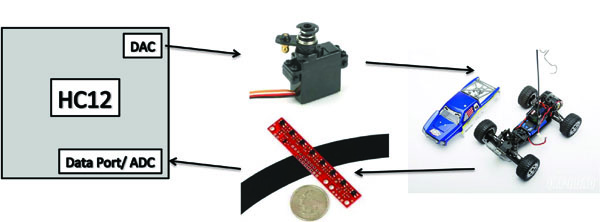
Path Following Robot
Felix Nurdin, Nick Andrews, Anthony Johnson, and Kevin Hsieh designed this autonomous path following robot. The main challenges were sensor integration and the development of a tracking control law. They successfully implemented the controller using both analog differential sensing and digital absolute sensing. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2011.
Team Photo
Prototype
Final Demonstration
BIO-MIMETIC SWIMMER
Alex Ching, a Sophomore majoring in Mechanical and Electrical Engineering with a focus in robotics, investigated the use of fluid waves to actuate a bio-mimetic swimmer as part of his summer research project in 2010.
Careful Assembly
Initial Design
Intermediate Design
Final Demonstration
Solar Panel Tracker
Haris Ozegovich, Azamat Akkushin, Alexander Babchanik, and Michael Karatsupa designed a solar tracker to keep solar panels aligned to the sun. Challenges included handling interference such as a cloud layer and variations in intensity. A. prototype was designed and successfully tested to show the ability to track a potentially varying light source. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2009
Team Photo
Final Demonstration
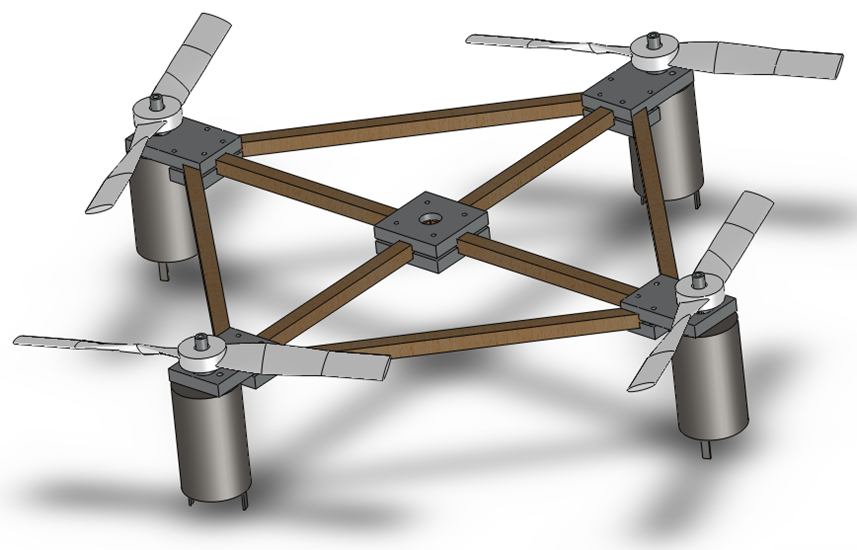
Quad-copter
T J Werle, Brandon O'Toole, Scott Wilcox, and Robbie Schwartz built a prototype 4-rotor helicopter. Challenges including designing a light-weight frame and controlling the motors using pulse-width modulation with the HC12. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2009
Team Photo
Quad-copter Zoom-in
Final Demonstration
Gutter Bot
Taylor Grenier, Martin Vogel, Zack Smith and Michael Somintac designed and built a prototype gutter cleaning robot. Challenges including making a small enough prototype to fit in a standard gutter, sensing if the robot is stuck or if it has reached the end of a gutter, and designing an anti-flip mechanism. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2009
Team Photo
Zoom-in of Device
Final Demonstration
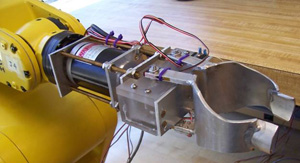
Robotic End-Effector
Joleen Grazier, Matthew Lai, Geoff Wales, and Alicia Skilton designed an end effector for a robotic arm to pick up test tubes and beakers. Challenges including programming the HC12 to control a stepper motor and interfacing the design with a FANUC robotic arm. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2009
Team Photo
Zoom-in of End-Effector
Final Demonstration
Brain Controlled Interface for Robotics
Mark Kirshenbaum, Dorian Gahm and Sean Chang designed a sensor to measure forehead muscle motions to control robotic devices. Challenges including conditioning of the signals measured from a headband, and signal processing to control a motor. The signals were used to control This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2009
Instrumented headband
Team Photo
Preliminary Test
Different Person
Control!
SMA Actuated Robotic Fingers
Alexander Lee and Ian Cairns built and tested SMA-based bio-mimetic fingers. This was the summer project of these high school to-be-seniors in 2007. They based the design on human muscles; a battery was used supply power to actuate (heat) the SMA wires to bend the fingers and a spring was used to extend these fingers back. Details can be found in these
presentation slides.
Team Photo
Preliminary Test
Final Demonstration
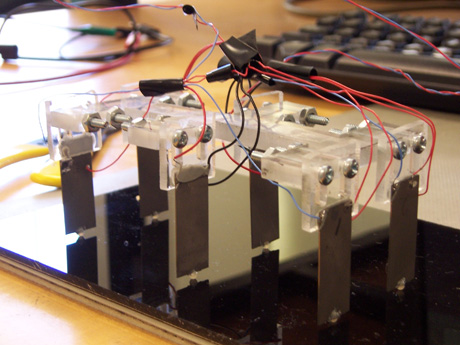
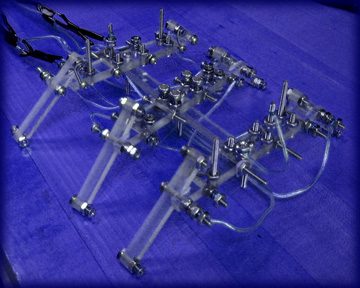
Piezoelectric Robot
Robert David Oylear and Amar Seta built and tested a piezoelectric bio-mimetic robot. This insect-like robot had six legs; each leg motion was generated using bimorph piezoelectric actuators, which were driven by asymmetric input waves. The finished robot fitted within a size restriction of 6" X 6" X 6". Although, each actuator's motion was only in the micron range, the robot successfully achieved a speed of 1.8 cm/s. This project was part of ME 495 (Mechatronics) Capstone Design Projects, SPRING 2007.
Reese Allen, Ryan Goding, and Mohd Ikmal Ismail built and tested a shape memory alloy (SMA) based bio-mimetic robot. This insect-like robot had six legs; each leg motion was controlled with SMA wires. The finished robot fitted within a size restriction of 6" X 6" X 6". This project was part of ME 495 (Mechatronics) Capstone Design Projects, SPRING 2007.
Team Photo
SMA robot
Experimental Test
Shape Memory Alloy (SMA) Actuated Robotic Arm
Moses Chong, Binh Huynh, Patrick McConnell, James McDonnell, Levi Mulkey, Piandy Piandy, and Matthew Spencer designed a shape-memory-alloy (SMA) rotary actuator for a robotic arm. Additionally, an SMA actuated hand was designed to grasp objects such as a can (shown in the video). Challenges included the modeling of the nonlinear hysteretic behavior of the SMA and the design of a controller for the nonlinear system. The actuator was used to control the position of a robotic arm to simulate human motion – with 90 degrees of rotation and 0.1 Hz. A prototype was designed and successfully tested. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2005.
Team Photo
Final Demonstration
Autonomous Submarine Project
Jason Ginn, Adam Robinson and Joe Schroeder developed automatic depth and pitch control to aid Future Human Powered Submarine Teams to achieve and maintain a desired depth -- it is challenging to maintain a constant depth with the human powered submarine. The depth tends to oscillate due to possible driver over-correction and thus degrades performance. Issues included the modeling of the nonlinear submarine dynamics and the choice of adequate number (and type) of sensors and actuators. The team designed and built a prototype submarine and successfully demonstrated the effectiveness of their controller using an HC11 microcontroller. This project was part of ME495 (Mechatronics) Capstone Design Projects, SPRING 2005.
Assembled System
Initial Test
Final Demonstration
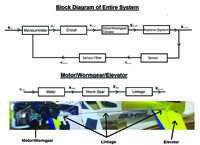
Boom Crane Dynamics and Control
As part of the Mechatronics project, students built a prototype crane, modeled the system, designed and implemented a controller, and tested its ability to reduce the settling time. Data acquisition and evaluation were performed with a microcontroller.
This project was part of ME495 (Mechatronics) Capstone Design Projects, Spring 2005
Flexible-Structure Test System
Design and Control of Dual Stage Actuators
Design and Control of Dual Stage Actuators: Students designed, built, and controlled this dual-stage piezo-positioning system. This dual-stage system integrates a relatively large piezo to achieve large range (although the bandwidth and precision is low) with a smaller piezo with high bandwidth and high precision (although with low range). The integrated system achieves precision, large-range positioning with high bandwidth. This project was part of ME495 (Mechatronics) Capstone Design Projects, Spring 2003.
Piezo-based Positioning System
Active Vibration Suppression
Students in the Mechatronics thread designed and, built a flexible structure that simulated the vibrations of the Yokohama Landmark Tower (a 70-story, 296-meter building in Yokohama City), which was the tallest building in Japan as of 1998. An Active Mass Damper system was added to the top of the flexible structure and the students built a control system to reduce the structural vibration. This project was part of ME495 (Mechatronics) Capstone Design Projects, Spring 2003
Flexible-Structure Test System
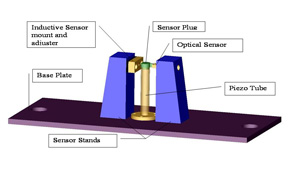
Control of High-Speed Scanners
As part of the Mechatronics project, students built an optical sensor (with nanoscale resolution) for measuring and controlling vibrations in a piezo-scanner during high-speed positioning. The sensor was calibrated with an inductive sensor and a controller was designed, built and tested for vibration suppression. This project was part of ME495 (Mechatronics) Capstone Design Projects, Spring 2003
Nanopositioning Scanner
Piezoelectric Rotational Motor
Roozbeh Chavoshian, David Keller, Richard Morris, Alex Nameroff,
Timothy Reed designed and built a piezoelectric rotational motor.
Each piezo makes micron-sized steps -- these steps are accumulated to
achieve large-scale movement. This project was part of ME 495
(Mechatronics) Capstone Design Project SPRING 2001.
Assembled System
Testing and Debugging
Video of piezomotor in operation
Sumo and Hockey-Playing Robots
These design projects were the final projects for the Mechatronics course sequence
at the U. of Utah. Microcontrollers were used to monitor sensors and control
these fully autonomous robots.
Left photo shows a Sumo-Wrestling Robot (1997) with a light sensor
at the top to detect the center of the hockey ring
(where a light bulb was placed) and various devices to
ram or shove the other robot out of the ring.
For the hockey-playing robots (1998, 1999), photo-sensors
were used to detect the hockey puck.
In both cases, ultrasonic
sensors and touch sensors were used to detect other robots.
Mechatronics is the term originally coined to describe the integration of mechanical, electrical, and computer technologies into the design of complex products. Although products have long included all three components, traditional design methods viewed them as separate, independently realized aspects of the design. Mechatronics emphasizes global optimization by integrating these three components of the design process.
Senior Design Projects
The mechatronics capstone projects (examples shown in this page) include applications in robotics, automation and controls. These Design projects are
part of the
the Mechatronics Curriculum at UW ME, and have been offered
since the Autumn of 1996.
The Mechatronics Option for ME BS Degree
You can get an Option in Mechatronics (that appears
in the official transcript) with a
Bachelor of Science in Mechanical Engineering.
See --- Application Form and
Requirements.
Projects were partially supported by grants from the National Science Foundation.
The the opinions, findings, and conclusions, or recommendations expressed here are those of the author and do not necessarily reflect the views of the National Science Foundation