(i) uNet: a new scalable
Unmanned Aerial Vehicle (UAV) operation paradigm to
enable a large number of relatively low-cost UAVs to
fly beyond-line-of-sight and
(ii) provably-safe
(conflict resolution) procedures
for distributed air traffic control.
A Scalable Low-Cost-UAV Traffic Network (uNet)
Background: Low-cost beyond line of sight flight
Under current free-flight-like paradigm, wherein a Unmanned Aerial Vehicle (UAV) can travel along any route as long as it avoids restricted airspace and altitudes. However, this requires expensive on-board sensing and communication as well as substantial human effort in order to ensure avoidance of obstacles and collisions. The increased cost serves as an impediment to the emergence and development of broader UAV applications.
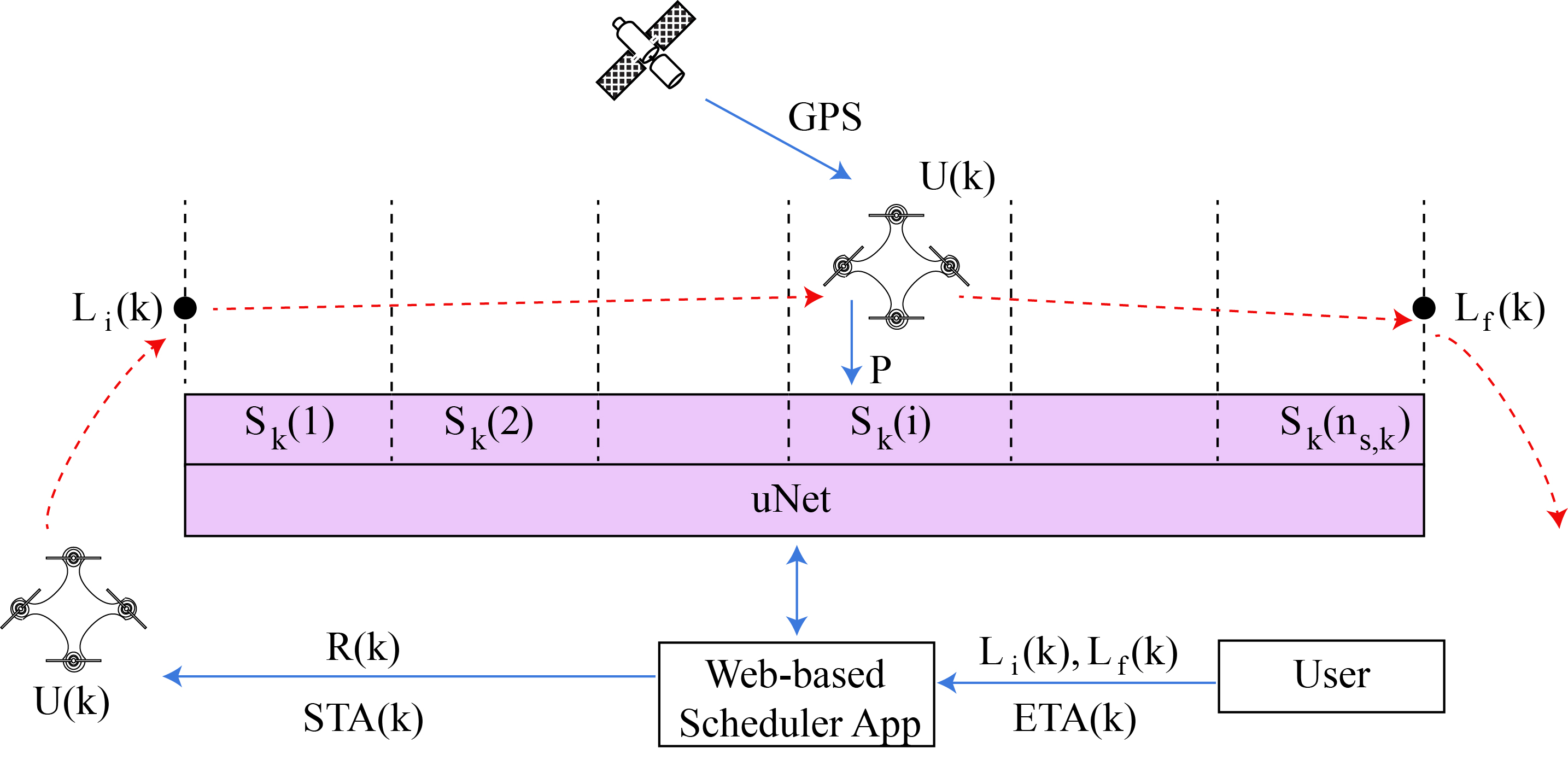
Schematic routing of the kth UAV U(k) through the uNet from the initial location Li(k) in the initial sector-level uNet Sk(1) to the final location
Lf(k) in the
final sector-level uNet Sk(ns,k). For a given expected time of arrival ETA(k) into the uNet, the router negotiates
between multiple sNets to determine the scheduled time of arrival STA(k) and a conflict-free flight route R(k) that spans multiple sNets Sk(i) for i=1 to
i=ns,k. While in a current sNet Sk(i)
at time t, the UAV U(k) receives GPS information and communicates its position P[U(k)](t) to the sNet Sk(i).
The main contribution of this work
(Ref 6)
is to propose the use of pre-established route network for UAV traffic management, which allows: (i) pre- mapping of obstacles along the route network to reduce the onboard sensing requirements and the associated costs for avoiding such obstacles; and (ii) use of well-developed routing algorithms to select UAV schedules that avoid conflicts. Available GPS-based navigation can be used to fly the UAV along the selected route and time schedule with relatively low added cost, which therefore, reduces the barrier to entry into new UAV-applications market.
Air Traffic Control
Background: It is challenging to prove safety
A challenge in the
design of conflict resolution procedures (CRP) used
in Air Traffic Control
(ATC) is to guarantee
the overall safety and efficiency of a route network with
multiple intersections — where each CRP acts locally, in
space and in time.
CRPs tend to be decoupled (spatially-and-temporally) because
of a substantial increase in computational and modeling
complexity with a single global CRP (due to increased number
of aircraft and conflicts) when compared to decoupled CRPs.
Additionally, a global CRP over a large airspace is
inefficient (with lower overall capacity) because of the
need to handle the larger uncertainty. The uncertainty
tends to be larger, e.g., because of ground-speed sensitivity
to wind and temperature that depend, in turn, on forecasts of
dynamic weather conditions with substantial uncertainties over
time. Therefore, decoupled CRPs are needed to manage the
complexity and uncertainty in air traffic control (ATC).
It is challenging to guarantee overall stability in a route network
with multiple conflicts (especially if the CRP solves each one locally).
In particular, a challenge is
to ensure that modifications of flight trajectories, for resolving
a local conflict, do not lead to a domino effect; i.e., resolution
of a conflict should not lead to new conflicts. Moreover,
for guaranteeing safety, the procedure should always lead to
a solution of the conflict resolution problem. Developing such
provably-safe, decoupled CRPs remains a challenging problem
in ATC.
Issue 1:
Necessary and Sufficient Conditions for Decoupled, Provably-Safe Conflict Resolution
Our work
(Ref 1)
identifies necessary and
sufficient conditions for provably-safe decoupled CRP.
Additionally, this work demonstrates the existence of
decentralized en-route CRPs that satisfy the decoupling conditions
for each local conflict and, thereby, guarantee global conflict resolution.
An advantage of the proposed CRPs is that they do not require a reduction
in the aircraft flow levels in the intersecting routes for
conflict resolution, which can aid in increasing the efficiency of en-route ATC.
The Always-On De-Centralized CRP
The
key concept is to split the main routes into multiple paths for generating
larger spacing between aircraft -- thereby, enabling sufficient space between aircraft on
intersecting routes for conflict
free intersections. These paths are then merged back into original
route to avoid additional conflicts in the region beyond the local
space needed for the CRP.
The CRP is illustrated in the following video.
Note that the circles represent a 5 Nautical Mile (NM)
diameter disc centered
around the aircraft.
The goal is to ensure that these disc do not overlap,
i.e., a minimal separation distance of 5NM is maintained at all times.
The aircraft, at the center of each circle,
is not shown to scale and is much smaller than it appears here.
No Capacity Loss: A major advantage of the proposed approch
is that it does not require reduction
in the capacity in each of the intersecting routes. This can enable the design
of air traffic management schemes that are more efficient.
Issue 2: General Intersections
Including Roll Dynamics
The initial work in
(Ref 1)
did not bound the aircraft turn-rate, i.e., the heading
angle was assumed to change instantly. While the roll dynamics
(that leads to an aircraft turn) is relatively fast and can be
ignored in the CRP design, the turn dynamics places an upper
bound on the turn-rate, which could affect the CRP design.
The design of provably-safe CRPs in
(Ref 1) was extended in
(Ref 2)
by including the bounded-turn-rate
limitation. The resulting
CRP is illustrated in the following video (see middle
intersection between blue and magenta aircraft.)
Accomodating Different Speeds and Non-perpendicular Intersections
Ref 3
removes two limitations in these decoupled
provably-safe CRP approaches by: (i) developing procedures
for non-perpendicular intersections; and (ii) removing the
requirement that aircraft on each intersecting route have the
same speed. The resulting CRP is illustrated
in the above video. See top
intersection between blue and red aircraft for non-perpendicular
with same speed case and the bottom
intersection between blue and green aircraft for non-perpendicular
with different speed case. Additional details,
such as synchronization issues (and application to intermittent conflicts)
are discussed in Ref 5
The top intersection is non-perpendicular with same aircraft
speed in each route.
The middle intersection is perpendicular with
same aircraft speed in each route.
The bottom intersection is non-perpendicular with different
aircraft speeds in the two intersecting routes.
Note, again, that the circles represent a 5 Nautical Mile (NM)
diameter disc centered
around the aircraft.
The goal is to ensure that these disc do not overlap,
i.e., a minimal separation distance of 5NM is maintained at all times.
The aircraft, at the center of the circle,
is not shown to scale and is much smaller than it appears here.
The above provably-safe CRPs solve the conflict resolution problem for
intersecting routes in a local manner that leads to decoupling of
CRPs for different intersections.
Issue 3: On-demand Conflict Resolution
The above CRP is inefficient
because it is always on — even in the absence of conflicts.
This always-on CRP (even without conflicts) leads to unwanted CRP
maneuvers resulting in increased travel time, travel distance and
required fuel.
Ref 4 removes the inefficiency of
always-on CRPs by developing provably-safe CRPs that can be
activated on-demand (when conflicts appear) to accommodate an
impending conflict. Conditions are developed to guarantee safety
during activation and deactivation of the CRP, and the proposed
on-demand approach is illustrated through an example route
intersection shown in the following video.
Application to the non-perpendicular case is discussed in Ref 5
Note that the circles represent a 5 Nautical Mile (NM)
diameter disc centered
around the aircraft.
The goal is to ensure that these disc do not overlap,
i.e., a minimal separation distance of 5NM is maintained at all times.
The aircraft, at the center of each circle,
is not shown to scale and is much smaller than it appears here.
The main idea is to allow deactivation when sufficient space is
available and ensuring the ability to activate the CRP in a
safe manner, which can also be extended to non-perpendicular CRP
designs or cases when the nominal speed of the aircraft are
different along the two routes, e.g., in CRP designs studied
in Ref 3 .
Issue 4: Centralized vs. De-Centralized Implementation
The use of on-demand CRP increases the need for information
sharing and increased centralization of the CRP implementation.
For example, with the always-on 2-path CRP, an
aircraft arriving at the initial waypoint can choose a CRP path
based on the arrival time. The choice of the path can be made in a
de-centralized manner because it does
not depend on previous arrivals on the same route or arrivals in the other
route in the intersection.
In contrast, with the on-demand CRP,
additional information about aircraft in both routes is needed
to make the decision to activate or deactivate the CRP. Thus,
the increase in efficiency of the on-demand CRP (compared
to the always-on CRP) is at the cost of increased need for
information-of and co-ordination-between aircraft in the two
routes.
Issue 5: Robustness
Timing is critical to maintain the minimal spacing needed
to avoid conflict in the proposed CRP approach and the
activation and deactivation procedures. The robustness of the
proposed CRP can be increased by using larger (minimal)
separation distances in the CRP design as discussed,
e.g., in
(Ref 1) and
(Ref 2) ,
to create additional buffer space and thereby, allow
for uncertainty/error in the aircraft arrival timing as well as
aircraft velocities — at the cost of increased space needed for
the CRP.
Issue 6: Exploit No-Capacity-Loss with CRP for
Adverse-Weather-Rerouting Playbook Design
Current approaches to reroute aircraft around adverse weather includes
merges, which leads to loss of capacity. For example, under
current traffic flow management (TFM), standardized procedures
in the National Severe Weather Playbook allow aircraft to be rerouted
around a region with adverse weather. For route simplicity,
air routes (even those going to different destinations)
tend to be merged before rerouting around the adverseweather
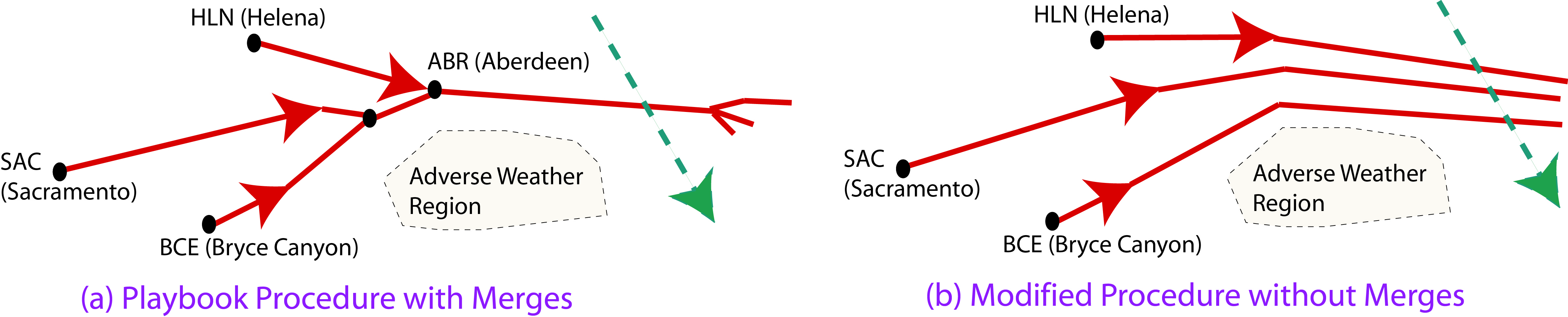
region. For example, Fig. a shows the West
Watertown' procedure, can be used to merge and reroute
aircraft from the west coast
when a
large area in the Midwest is affected by adverse weather.
Merges simplify conflict resolution in nearby regions (e.g.,
with the route represented by a dashed line in Fig. a)
and ease the interfacing with human controllers. However,
the restriction on the acceptable aircraft-flow level on
the merged route leads to a reduction of the acceptable
aircraft-flow levels in the routes that are merged.
Our work in
(Ref 1)
suggests that rerouting should be considered through nearby sectors
without the use of undesirable merges, and thereby
avoiding the reduction in aircraft-flow levels in the routes that
aim to pass through the affected region, e.g., as illustrated
in Fig. b.
The increase in number of reroutes
(when compared to the case with merges) can increase
the number of intersections with preexisting routes, and
thereby increase potential conflicts, in the nearby region.
However, the results in
(Ref 1) enable the use potentially automated conflict
resolution procedures (CRPs) with guaranteed solutions to the nearby
conflicts. Furthermore, these CRPs do not require a reduction
in the aircraft-flow levels (i.e., capacity of the reroutes)
for conflict resolution, which can improve the ATC efficiency when
compared to existing merge-based procedures.
Ref 3:
J. Yoo and S. Devasia
"Decoupled Conflict Resolution Procedures for Non-pependicular
Air Traffic Intersections with Different Speeds,"
2013 Conference on Decision and Control.
Ref 4:
J. Yoo and S. Devasia
"On-demand Confict Resolution Procedures for Air Traffic Intersections,"
IEEE Transactions on Intelligent Transportation Systems, Vol. 15 (4), pp. 1538-1549, August 2014.
Ref 5:
J. Yoo
"Flow-Capacity-Maintaining, Decoupled Conflict Resolution Procedures
for Air Traffic Control,"
Ph.D. Thesis, U. of Washington, 2014.