Model Development and Sensitivity Analysis of Clutched Spring Parameters
Presented at VA Young Investigators Symposium, 2015
Downloads: Presentation Slides, Abstract
Introduction
There are a variety of compensations that occur in amputee gait. For example, hip flexor muscles (e.g., iliopsoas) have much higher activation in amputee gait to help propel the leg into swing phase, a task normally achieved by the biarticular gastrocnemius (GAS) [1]. To improve amputee gait we are developing a foot-ankle prosthesis with a biarticular clutched spring element to serve similar gait function as GAS. We hypothesized that a biarticular spring element can replicate GAS contributions to knee and ankle joint moments, and that spring parameters such as attachment point, clutch timing, and stiffness will have a significant effect on device function.
Methods
A generic unilateral transtibial amputee model was developed in OpenSim such that the residual shank and prosthesis match average mass properties from literature [2,3]. The model has 21 degrees of freedom and 50 muscles. The prosthetic ankle is driven exclusively by a reserve actuator.
A passive biarticular spring was added to the model. The baseline (BL) spring had the same attachment points as GAS in the healthy model and a stiffness of 100 N/mm, which is an estimate of the physiological GAS stiffness [4]. The length of GAS at 20% of the gait cycle (when GAS begins producing force) was used as spring rest length. Each parameter (proximal attachment, clutch timing, and stiffness) was varied individually to measure the effect on knee and ankle joint moment contributions. Knee attachment was moved in the posterior and superior directions to represent an external attachment that is higher above the knee than the GAS origin. New clutch engagement times were chosen to be 18% and 22% of the gait cycle, which resulted in a -1.4 mm and +1.4 mm change in rest length from BL respectively. A static optimization simulation was carried out for each set of biarticular spring parameters. The biarticular spring force, and the biarticular spring’s contribution to knee and ankle joint torque was calculated.
Results and Discussion
The BL trial did not match GAS force or contributions to knee and ankle moment (Table 1). Moving the knee attachment 1 cm posteriorly and superiorly more closely replicated GAS function, generating 76% of GAS knee moment contribution, and 65% of the ankle moment contribution (Table 1, Figure 1). Knee attachment +2.5cm away from BL resulted in knee moment contribution 6% greater than physiological GAS. Knee and ankle moment contributions varied directly with changes in spring stiffness.
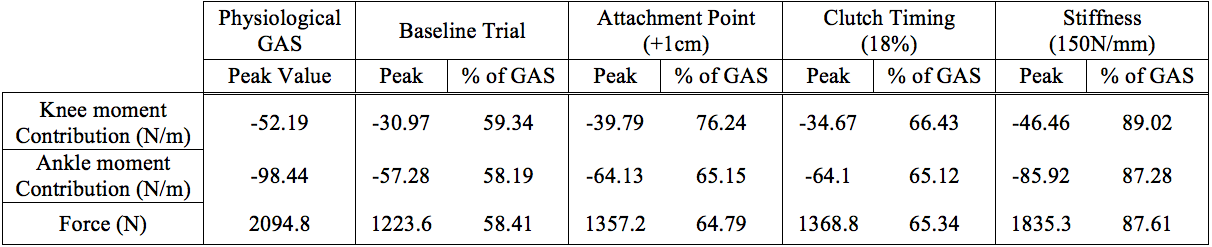
Peak values and % of GAS contribution to knee moment, ankle moment, and force.
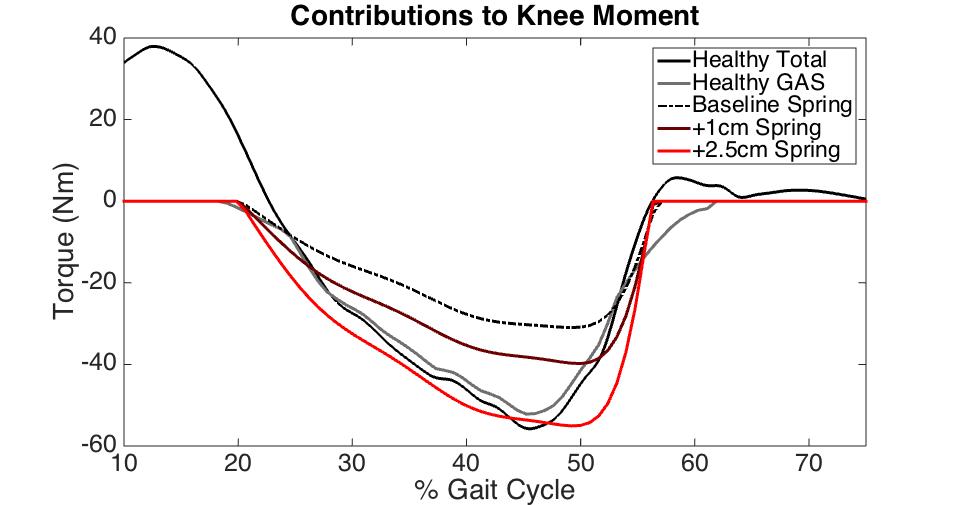
Contributions to knee joint moment with varied proximal attachment points.
Engaging the clutch 2% of the gait cycle early (or about 25 milliseconds) increased both knee and ankle moment contribution 7%. This large change in moment contribution with a small change in timing indicates that the device function is highly sensitive to clutch timing.
Moving the proximal attachment point can alter the joint moment contribution without requiring an increase in spring force, thus altering the attachment point (and thereby the moment arm) may provide significant design advantages in reducing the spring stiffness necessary to match GAS function. These simulations neglect soft tissue compliance at the proximal attachment point, which may be an important factor in the design of the device.
References
- Zmitrewicz RJ, et al. J Biomech, 40, 1824-1831, 2007.
- Silverman AK, Neptune RR. J Biomech, 45, 2271-2278, 2012.
- Smith JD, et al. J Vis Exp, 87, 2014.
- Krishnaswamy P, et al. PLoS Comput Biol, 7(3), 2011.