Autonomous Airborne Geomagnetic Surveying and Target Identification
In the past, search-type missions have always required a heavy human involvement.
Tasks such as monitoring and interpreting sensor readings require extensive
operator attention and involvement. In a noisy environment, it becomes difficult
for a human operator to classify a sensor reading and quantify confidence in
these readings. In this situation, we make use of a probabilistic method to
both search for a target and identify anomalies.
Aeromagnetic Data Surveys
The most crucial piece of information required by the ground station is a local
magnetic map of the region where the search is taking place. This map of the
total magnetic intensity (TMI) of the region may be acquired using analytical
models such as the WMM-2000 or WGS-84 model. However, since these models are
coefficient-based analytical models, they do not capture temporal or small
local variations in magnetic field strength. When an actual search is executed,
these small differences between the analytically modeled field and the actual
magnetic field will appear as magnetic anomalies. To minimize the number of
false anomaly encounters and to increase the accuracy of the simulation and
of the search, an actual magnetic survey is used for a local magnetic field
map. Data for an actual geomagnetic survey is provided by Fugro Airborne
Surveys. The data is collected by a manned aircraft equipped with a magnetometer
to measure the total magnetic intensity. This information coupled with a GPS
position gives the total magnetic intensity in "line data" form. This data
can then be interpolated into a 100x100 meter grid. Total magnetic intensity
readings at locations other than survey points are then linearly interpolated
from this square, 100x100 meter grid. The magnetic map and its approximate
geographical location are shown below in Figure 1.
Figure 1. Approximate search location and associated total magnetic intensity map
In the above figure, the data is acquired in an approximate 60x50 km grid. The
regions of uniform blue denote areas where data is not available. Assuming that
there are only permanent fixtures in the region when the map is acquired, this
map now makes up the reference set of data on the ground station.
A magnetic model of the desired target is also required. In the following example,
we propose a fictional magnetic model of a submarine.

Figure 2. Proposed magnetic signature of submarine
This magnetic signature is a function of many variables, namely sub depth, sensor
altitude, etc. Assuming that the magnetic signature of the submarine simply adds
to the total magnetic intensity of the local region in a linear fashion, anomalies
can easily be identified by simply subtracting the magnetometer reading from the
local reference map which is stored on the ground station.

Figure 3. Detecting magnetic anomalies
This architecture shown in Figure 3 can be used to compare magnetometer readings
with the reference data to create a differential measurement. Large differential
measurements imply the presence of a new magnetic anomaly and possible target.
If the UAV does not fly over any targets, the magnetic anomaly should be near zero,
excluding small temporal variations in magnetic field and sensor noise. A simple
grid search pattern and the associated total magnetic intensity trace and differential
measurement trace is shown below in Figure 4.
Figure 4. Trajectory and associated sensor measurements
In Figure 4, the location of the target is shown as a dashed red box and the trajectory
of the UAV is shown in the solid red line. The total magnetic intensity reading as the
UAV flies over this trajectory is shown in the upper trace to the right. The
differential measurement is shown in the lower trace.
As the UAV flies this search trajectory, it constantly compares the current sensor reading
to the reference data set to create a differential measurement. As can be seen, given the
magnetometer reading, it is obvious to detect where the anomaly occurred using the
differential measurement even though the actual range of absolute measurements may be large.
Occupancy Map Based Searches
As can be seen in Figure 4, one search pattern that can be used is a simple grid search
pattern. However, for a team of autonomous agents, a more intelligent approach is desirable.
Current research is directed towards employing an occupancy based map search. In this scheme,
the search domain is discretized into rectangular grids. Each grid is assigned a score based
on the probability that the target is located in that grid. This is similar to a 2 dimensional,
discretized probability density function [1]. The initial occupancy map for the domain shown
in Figure 1 is shown below in Figure 5.
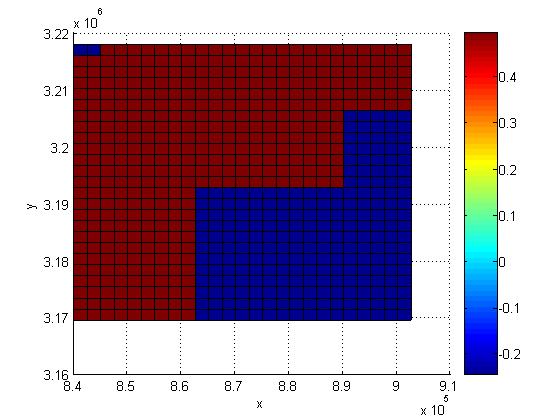
Figure 5. Initial occupancy based map
Here, the cells where no data is available are scored with a zero probability. In effect, this
will ensure that the agents only search regions where the total magnetic intensity map is available.
A centralized control structure is used so that the team of autonomous agents can update and
formulate control strategies based on a single occupancy map. The basic centralized algorithm
that is being used makes use of a team utility function and evolutionary computation ideas.
At each sampling period, each agent will assign a score to the cell that is has most recently
searched. Once this is complete, each agent evaluates possible control actions from a given
population and chooses an appropriate control action which maximizes a given team utility
function [2]. This type of behavior is shown below in Figure 6. In this scenario, there
are three agents (blue and yellow figures) searching for a single submarine. There are also
three false anomalies for them to encounter (brown and red boats).

Figure 6. Agents carrying out search using occupancy map based search
This single map is updated by the agents as they search each grid. If an agent searches a
grid and does not encounter any anomalies, this grid is updated with a low score. However,
if an agent encounters an anomaly which it then determines to be the target of interest,
the immediate grid and several of the surrounding grids are given a high score. This creates
a type of gradient that other agents can use to converge on the target. The difficultly
arises from accurately and efficiently identifying the encountered anomalies as either the
target of interest or as a false anomaly.
Identifying and Classifying Anomalies Using Particle Filters
Magnetic anomalies can be caused by many factors such as temporal variations in magnetic field
or false targets encounters (ie boats/vessels). Once a magnetic anomaly is encountered, it
must be identified and classified. In simple terms, the overall goal is to either classify
the anomaly as the target or a false reading. Obviously, it would be simple to identify the
anomaly if the entire magnetic signature of the anomaly is obtained (ie the UAV flies over the
entire boxed region in Figure 4). However, this requires many passes over a potential target.
If the anomaly is moving or evading, this may not be possible. The question now becomes, given
only one or two passes over the target, is it possible to correctly identify or provide a
probability that this anomaly is indeed the target being sough after? To address this issue,
a particle filter method is used. This is a non-parametric bayes filter technique which estimates
the state of the UAV with respect to the sub using a finite number of state hypotheses.
When the UAV encounters an anomaly whose magnitude exceeds the noise threshold (approximately 1
nT in Figure 4), the particle filter is started in an attempt to estimate the state of the UAV
with respect to the target. The particle filter's progression is shown below in Figure 7.
Figure 7. Particle filter progression
In this animation, the large red circle represents the actual location of the UAV. The smaller
purple dots represent the particle filter's many different hypotheses of the possible state of
the UAV (position north, position east, and heading). This array of state hypotheses are known
as particles. As the UAV obtains more and more sensor measurements (at a simulated rate of 1 Hz),
the particle filter is able to eliminate particles which are inconsistent with the current
measurement and resample these particles to regions which have a higher probability of producing
the measured sensor reading. This is why as time progresses, the particles become concentrated
about the actual UAV location. Near the end of the simulation, there are four distinct groups of
particles. This is due to the symmetry of the underlying target signature. Each of these four
groups of particles are equally likely because each group would produce the correct measured sensor
readings. Because of this, the particle filter is not able to uniquely identify the position of
the UAV with respect to the submarine. This would require multiple passes over the target and more
sensor measurements.
Each particle is assigned a weight which is a function of how likely it is to make the correct sensor
measurement given its state. For example, a particle which is very close to the actual UAV position
has a very high probability that it will make the same projected sensor measurement as the actual UAV,
therefore, it is assigned a high score. In contrast, a particle which is farther away from the actual
UAV will have a projected measurement which is significantly different from that of the actual UAV and
thus, will receive a low score. The sum of all the particle's scores provides a qualitative measure of
how confident the particle filter is that the anomaly encountered is the actual target. The sum of the
particle weights for an encounter with the actual target and an encounter with a false anomaly is shown
below in Figure 8.
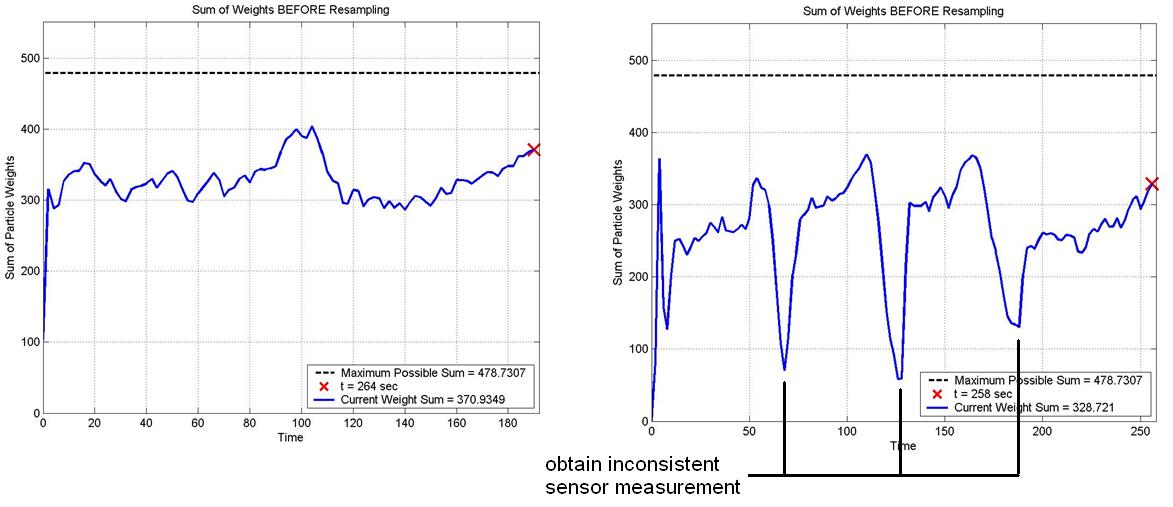
Figure 8. Comparison of sum of weights trace for actual (left) and false (right) anomaly encounter
In Figure 8, the difference between a true target encounter and a false anomaly encounters is fairly
clear. In the situation where the UAV encounters the true target, the confidence measure (the sum
of all particle weights) increases initially (as the particles are quickly resampled to locations
which are consistent with the sensor measurements) and then stays fairly constant. However, in the
case where the UAV encounters a false anomaly, the particle filter regularly "loses confidence" as
inconsistent sensor measurements are obtained. This is characterized by the sharp drops in the sum
of the particle weights. Current research is directed towards training a neural net to recognize
these features and thus provide a qualitative measure to the target identification problem. In the
end, the particle filter will provide the trace of sum of the weights over time (Figure 8) and the
neural net will process this trace. In combination, the particle filter and neural network provides
a mapping from magnetic sensor measurements to a single scalar value which represents a measure of
how confident the particle filter is that the encountered anomaly is the desired target or not.
References
-
C. W. Lum, R. T. Rysdyk, and A. Pongpunwattana, "Occupancy Based Map Searching Using Heterogeneous Teams of Autonomous Vehicles"
Proceedings of the AIAA Guidance, Navigation, and Control Conference,
August 2006 [.pdf]
-
C. W. Lum, R. T. Rysdyk, and A. Pongpunwattana, "Autonomous Airborne Geomagnetic Surveying and Target Identification"
Proceedings of the AIAA Infotech@Aerospace Conference,
September 2005 [.pdf]
-
C. W. Lum, "Cooperative Searching and Geomagnetic Surveying Using Teams of Autonomous Agents"
General Exam Proposal University of Washington,
June 2006 [.pdf]
-
C. W. Lum, "A Single Agent Search of a Two Dimensional Space Using Probability Collectives and Convex Optimization"
Technical Report, University of Washington,
March 2006 [.pdf]
-
F. Bourgault, T. Furukawa, H.F. Durrant-Whyte,
"Coordinated Decentralized Search for a Lost Target in a Bayesian World,"
Proceedings of the 2003 IEEE/RSJ Intl. Conference on Intelligent Robots and Systems,
Las Vegas, Nevada, October 2003.
-
A. Pongpunwattana, "Real-Time Planning for Teams of Autonomous Vehicles in Dynamic Uncertain Environments,"
Ph.D. Thesis, University of Washington, June, 2004.
|




