Data-Driven Modeling & Scientific Computation
Lecture 1
[ view ]
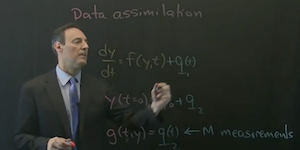
Data Assimilation 1: This lecture provides an introduction to data assimilation methods and the Kalman filter.
Lecture 2
[ view ]
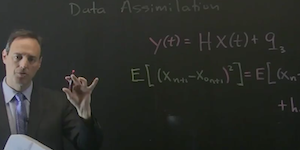
Data Assimilation 2: This lecture generalizes data assimilation to dynamical systems and introduces the Ensemble Kalman Filter (EKF).
Lecture 3
[ view ]
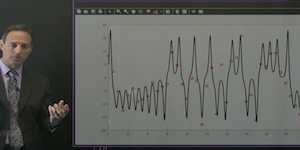
Data Assimilation 3: This lecture implements a basic Kalman filtering and data assimilation scheme on the Lorenz equations.
MATLAB CODE
KEY REFERENCES
J. N. Kutz, NOTES — CHAPTER 21 (Kutz, Data-Driven Modeling & Scientific Computation, Oxford 2013)
Miller, Ghil & Gauthiez, Data Assimilation in Strongly Nonlinear Dynamical Systems J. Atmos. Sci. 51 (1994) 1037