|
The University of Washington’s crane safety research is made possible through a partnership with the Crane Safety Research Center based at the Georgia Institute of Technology in Atlanta along with support from Andrea Wang and Henry Wong. On April 27, 2019, a catastrophic tower crane collapsed onto South Lake Union traffic, killing their daughter, Sarah Pantip Wong, along with Alan Justad, Andrew Yoder, and Travis Corbett. Last year, Andrea Wang and Henry Wong worked with Sen. Noel Frame (D-36th) and Rep. Julia Reed (D-36th) to pass
HB 2022.
Prior to HB 2022, WA state had no statues addressing public safety near tower cranes, which operate in some of the densest and most populated neighborhoods throughout Washington.
Ongoing efforts
Our current research on crane safety involves both graduate and undergraduate students and give our students the opportunity to make an impact on their own community, as well as the rest of the world.
Mobile crane safety

UW Undergraduate students Alex Cong, Nathaneal Bursch, Astro Trebach, Joseph Duffie, and Zach Ridgway are developing approaches to improve the safety of mobile cranes as part of their UW Mechanical Engineering Capstone project. Mobile cranes are prone to tipping over as in a recent accident in
Everett in 2025. The team found that between 1992-2006, an average of 22 construction workers died a year in crane accidents. 71% of those fatalities involved mobile cranes. The team's strategy for reducing accidents, damages, and injury is to design a controller that limits range, mitigates swinging, and notifies the operator of unstable conditions
Tower crane safety
UW Undergraduate students
Aidan Craine, Karsten Elijah Onarheim, Jacob Seto Lexi Shurygailo, and Andrew Zheng are developing approaches for tower crane operators to be notified when a payload is snagged on a ground object and to realign the payload and trolley to avoid damage and injury on site. Their work is motivated by a 2019 accident
where structural beams were dragged off of a
MIT construction site by a tower crane payload. This resulted in one person killed and two injured. The team's strategy is to rapidly measure the cable angle and inform the crane operator and the iron worker when the angle reaches threshold values associated with snag, and also develop automated methods to correct for the snag.
Safe Human-Machine Interactions
Our work in
Ref 1
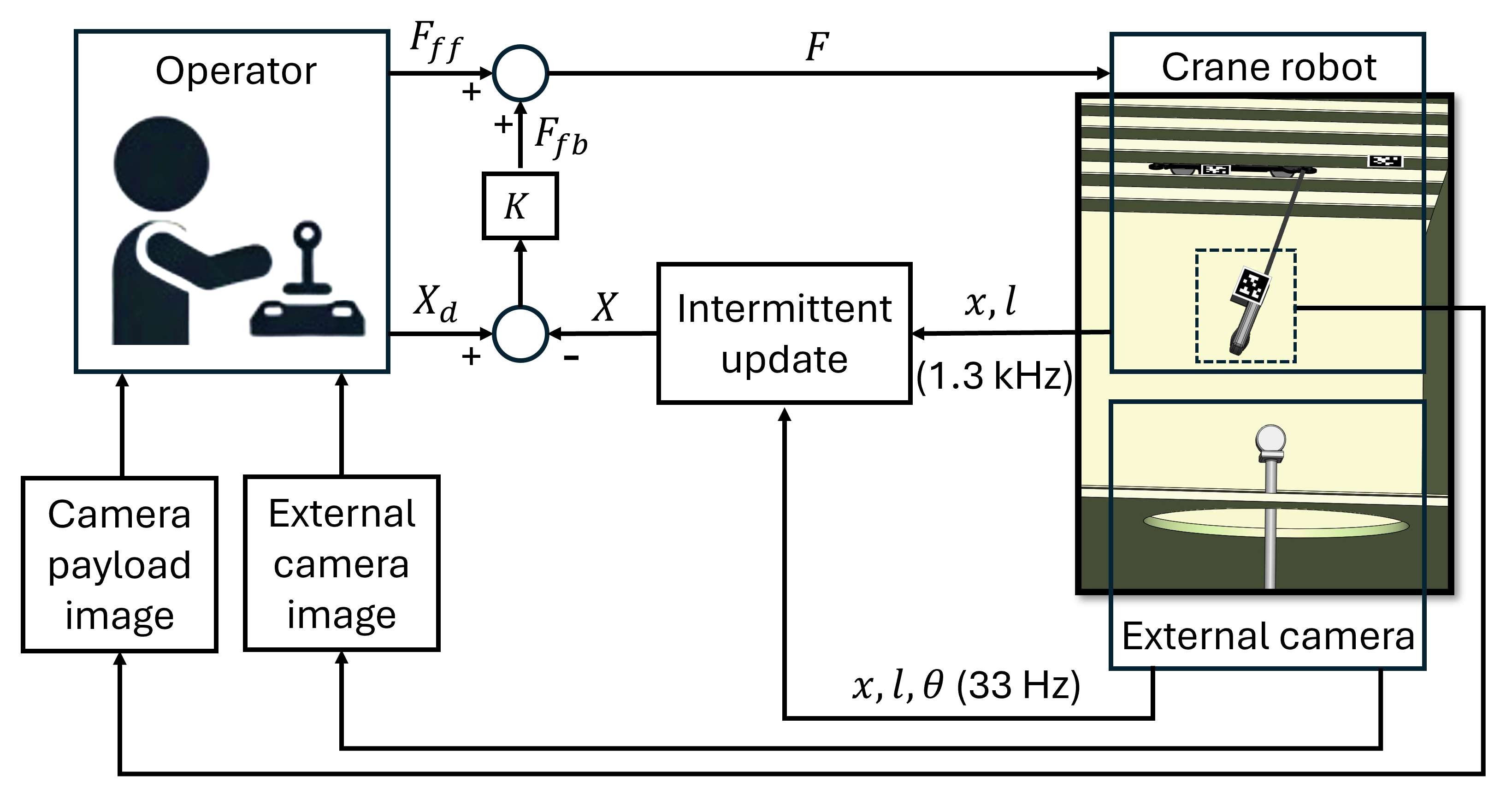
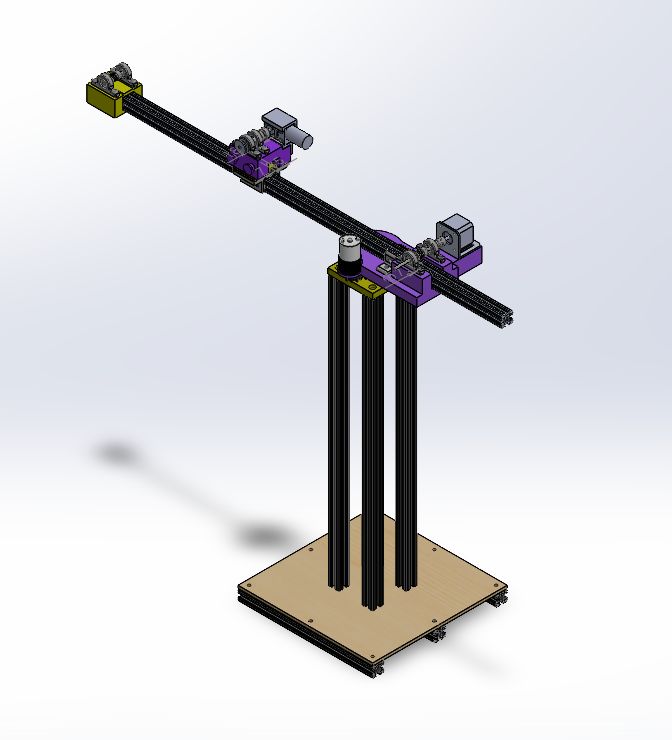
has developed a novel crane robot that can travel the entire span of the aircraft wing, enabling mechanics to perform inspection from outside of the confined space.
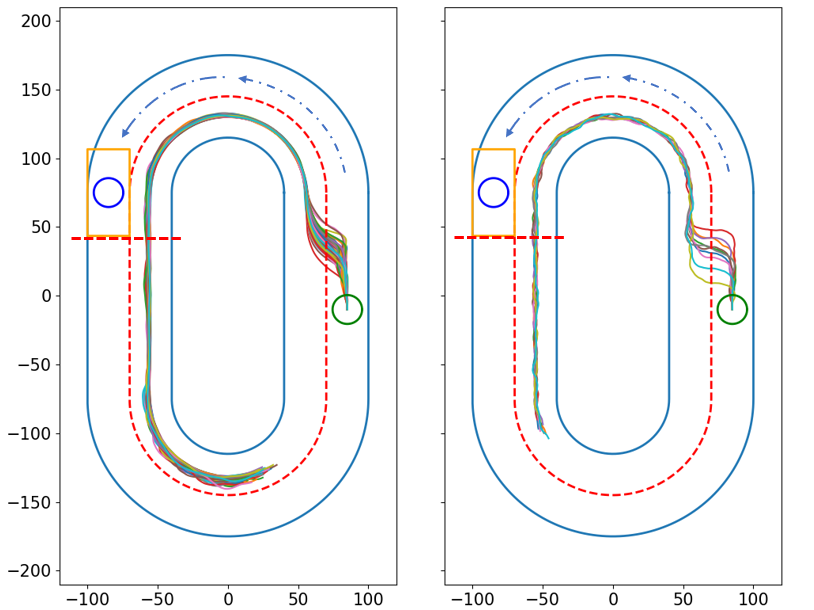
However, teleoperation of the crane robot can still be a challenge due to the need to avoid obstacles in the workspace and potential oscillations of the camera payload. The main contribution of this work is to exploit the differential flatness of the crane-robot dynamics for designing reduced-oscillation, collision-free time trajectories of the camera payload for use in teleoperation. Autonomous experiments verify the efficacy of removing undesired oscillations by 89%. Furthermore, teleoperation experiments demonstrate that the controller eliminated collisions (from 33% to 0%) when 12 participants performed an inspection task with the use of proposed trajectory selection when compared to the case without it. Moreover, even discounting the failures due to collisions, the proposed approach improved task efficiency by 18.7% when compared to the case without it.
Current PhD student Navneet Kaur is working to use sampling-based methods developed in
Ref 2: to improve crane safety.
|