PLIDAR-BASED TOPOGRAPHIC MAPS
IMPROVE AGREEMENT BETWEEN OFFICE-DESIGNED AND FIELD-VERIFIED ROAD LOCATIONS
Peter Schiess and Finn Krogstad
Proceedings of the 26th Annual Meeting of the
Council on
fkrogsta@u.washington.edu
ABSTRACT:
Existing photogrammetricly derived topographic maps are good for general planning of road and harvest activities. Sub-canopy topographic variation however is not identifiable by photogrammetry, necessitating field evaluation and often field design of marginal activities. The advent of airborne laser scanning (lidar) promises the possibility of detailed sub-canopy topography. This paper presents an evaluation of the utility of lidar topography for road and harvest design. In general, lidar allowed avoidance of ‘difficult’ areas, identification of areas in need of field validation, and confidence in the validity of map-based designs. Confidence however was limited by the tendency of some lidar mapping techniques to smooth over areas in which lidar was unable to penetrate the canopy and map the ground below.
PROBLEM
Topography can be a crucial element in assessing the utility of alternate road and harvest plans. In the past, photogrammetric mapping has been the most cost effective way to build topographic maps of forested areas. These maps provide good preliminary guidance for laying out roads and harvest units, unfortunately the trees that draw us to these areas also obscure the underlying topography. In difficult topography, planned skyline profiles and road alignments are frequently rendered unworkable by topographic ‘details’ that were not represented in the photogrammetric topography that was used to plan them.
Recent technological advances lead to a rapid spread in airborne laser altimetry (LIDAR) mapping of the earth’s surface. Just as in photogrammetry, forest canopies can intercept most of the laser pulses, but any stand in which sky can be seen from the ground will allow lidar penetration to the ground. Wherever the lidar pulse density can overcome canopy density, the resulting ground points can be interpolated into a topographic map (figure 1).
The resulting sub-canopy topography can display considerable topographic detail. In Figure 1, the microphotography of stream draws, landslides, and even abandoned road prisms are clearly visible. The photogrammetricly derived contour lines for this area either misrepresent or totally fail to represent these microtopographic features that can be difficult to design around. While lidar topography can not identify non-topographic design issues such as excess water and weak soils, it can frequently identify these problems when they produce even minor slumps or hummocky topography.
Figure 1. Lidar topography (hillshaded image) provides a realistic and detailed topography. Photogrammetricly produced contour lines capture the general shape of the landscape. However, complex features such as incised streams, draws and sharp ridges are not recognized. Nor are abandoned road beds identified by them. Superimposed on the map is a proposed road center line.
It is not initially obvious however, whether this superior topographic detail necessarily translates into better harvest and road planning. The cost of lidar mapping must somehow be justified by some combination of improved designs, reduced field work, and/or increased confidence in our plans. Ideally, lidar should provide enough detail to:
· Guide activities away from ‘problem areas’
· Identify areas most in need of field investigation.
· Identify options that are most likely to be validated in the field
· Estimate the level of confidence in field validation of a design
It might be imagined that Lidar, in combination with GIS-based road and harvest design tools might allow office-based road and harvest planning, without the need for costly field-based design and verification. As the above list suggests, the main benefits of lidar is not in replacing fieldwork, but in making it more efficient.
EVALUATION
This new mapping shows considerable promise in a range of
design activities. In order to evaluate
the design benefits of lidar topography, the students
in the
As part of the planning and design work the UW Forest Engineering Seniors traversed about 2.4 miles of a road centerline (P-Line). The traversing was done with a “Criterion 400” instrument, measuring slope distance, slope angle and compass bearing. The horizontal and vertical data points in Figure 2 were derived from slope distance and slope angle. The overall precision of the survey was about 1:700.
We compared profile elevations along a proposed road alignment. In Figure 2, the elevations inferred from lidar topography (solid line) agree well with profile elevations taken in the field (x’s). Elevations from older photogrammetricly derived topography (dashed) generally agree with the field data, except around draws and stream crossings where topographic accuracy is most important. Figures 1 and 2 show that a small draw (identified in the lidar and field data) was totally missed by photogrammetric topography, and that the topography of a large stream crossing was dramatically simplified, and showed an error of as much as 50 vertical feet.
As part of a different project a DNR forestry crew spent
eight man-days traversing 5 five profiles with clinometer,
stringbox and handcompass. Establishing the field profiles was deemed
critical to prove the viability of cable-yarding this particular harvest
unit. Based on the results of the road
traverse and its agreement with lidar-generated road
profiles we conclude that the same five skyline profiles could have been
generated in eight minutes from lidar maps with
comparable, if not higher certainty about their truthfulness.
While some might choose to evaluate the root-mean-square error or some other measure of accuracy, the true measure of lidar’s utility in road and harvest planning is whether we have confidence that a road or cable profile that is planned using lidar topography can actually be executed in the field. Small discrepancies can always be fixed with minor earthwork or alignment changes. Larger discrepancies however can require extensive redesign and often a whole new approach.
Figure 2. The topographic simplification of photogrammetric mapping becomes significant at incised stream crossings, just when exact elevations become most significant for road design. The traversed road elevations (x’s) agrees almost exactly with the lidar surface (solid), but the topographic smoothing of the photogrammetric topography (dashed) totally misrepresents the stream crossing, and does not even identify the smaller gully further up the road.
LIDAR
PROBLEMS
The impressive accuracy and detail of lidar topography however can still be inhibited by the forest canopy. Where young stands are so dense that it is difficult to see the sky, lidar systems are similarly prevented from penetrating to the ground. In such cases, lidar can provide no guidance to engineering design, and we must fall back on field methods for mapping and design.
Depending on the mapping technique, these areas of minimal canopy penetration can either be easy or difficult to identify. If the lowest lidar return in an area is assumed to be a ground return, then the resulting topographic surface will be easily identified since it won’t look like a real ground surface (Figure 3b). From past experience, we know that the area could contain gullies, earth slumps, or hummocky topography. And we know that we may need to field evaluate any design passing through such areas.
An alternate mapping approach would be to interpolate topography across these no-data areas to create a more realistic looking ground surface. But realism and reality are not the same. In creating a realistic interpolated topography, we hide the fact that we don’t really know what is under those dense canopies. Unrealistic topography at least tells us that we don’t know what the topography of an area is. Realistic smoothed topography however gives no clue that oure plan may be invalidated by problem areas that are not shown on the map. Making areas of unknown topography look like areas that really do have smoothed topography will necessarily make us suspicious of all areas of smoothed topography. This will necessitate field validation of all areas that look smooth, eliminating the benefit of having lidar topography.
The problem of the smoothing away of real topographic problems is exemplified in Figure 3b. The ridge running through the middle of the image was the preferred road alignment in an otherwise steep area. When [messing around in the field] however, several large rock outcrops were found along this ridge top that invalidated this entire ridge road option. They were not identified on the photogrammetric map or the orthophotos, and they had been smoothed off by the lidar mapping, so there was no warning that this entire ridge road might be unworkable. Had the outcrops been left as an anomalous topographic bulge, then they might have been investigated on the detailed aerial photographs (in which the outcrops were visible) and planning could have shifted to other alternatives. Instead, significant design and field time was wasted on a road option that could have been invalidated in the office.
These experiences might be taken to suggest a fundamental flaw in using lidar for engineering design. After all, why pay for mapping if you still have to validate and/or design in the field? Perhaps a more correct lesson is that when engineers are requesting lidar topographic mapping, they should request mapping techniques that sacrifice topographic ‘realism’ in favor allowing anomalies (whether outcrops or no-data regions) to express themselves.

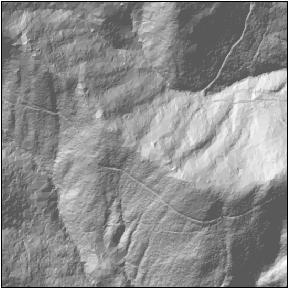
Figure 4. Where a dense canopy prevents all lidar pulses from reaching the ground, lidar can not provide useful information for planning. Depending on the mapping system however, it can provide misleading information. While both images provide excellent detail of streams and abandoned roads, the first image shows these as areas that clearly are not ground topography. The second image is more dangerous however, in that it provides no hints that there may be massive outcrops along the top of the ridge that were only identified in the field.
CONCLUSION
Initial
experience with lidar-based DEM’s
showed their usefulness in improving the reliability of “paper” or map-based
designs. However, surface expressions
such as wet soils, are not yet identifiable, still requiring field
verification. Given these inherent problems, engineers need to be suspicious of lidar generated topographies in which the problems are not
easily identifiable. Lidar
providers who smooth over data gaps to make topography ‘look good’ are not
helping their clients. Areas with
clearly identifiable problem can always be flagged for field inspection. If these problem areas can not be identified
however, engineers will face the same uncertainties that they face with today’s
lower quality mapping.
ACKNOWLEGMENTS
Funding for this project was provided by the Washington State Department of Natural Resources. Andrew Cooke of the Precision Forestry Initiative at the University of Washington College of Forest Resources and Jeremy Tryall of the Washington State Department of Natural Resources provided technical assistance with data processing.
AUTHORS
Peter Schiess is Professor of Forest Engineering in the
Finn Krogstad is a Doctoral Candidate in the