
2.007: License to Design. Also Known
As 2.70
This page is about the robot I built
for the class 2.007:
Introduction to Mechanical design, one of MIT's most famous courses
which culminates in a competition event staged in front of 400 people
and occasionally a national audience.
THE RULES
1997 Contest - "Pass the Puck" or "Not in My Back Yard"
- BASIC OBJECTIVE:
have less stuff on
your side of the table at the end of a 30 second round. You are pitted
against a single opposing robot.
- ROBOT CONTROL happens via four
electrical and two pneumatic switches. Your optional one-man pit crew
can help you drive.
- THE TABLE: Click here for an animated GIF of the table.
- SCORING: Balls are worth 1pt., pucks
are worth 3pts., your robot is worth 10pts. A "multiplier shelf" on
either end of the table doubles the value of anything on top of it.
THE DESIGN
PROCESS
Or "Reckon it'll work?"
PRELIMINARY GOALS:
- Reliability
- Versatility - this is in case one part of the machine ends up
not working correctly, or if a sudden change of strategy is needed
during a particular round.
- Ease of driving (nervousness is a factor)
FUNCTIONAL REQUIREMENTS:
- Be able to obtain the group of
nine balls from the multiplier shelf
- Be able to launch balls across the court to the opposing robot's
multiplier shelf
- Be mobile to increase versatility, point scoring potential
- Be able to push balls off the central ridge so it's easy to get
a few points if necessary and defend against intrusion by other robots.
RESULTANT DESIGN PARAMETERS:
- Ball shooter: use quickly
rotating cylinders powered by polaroid
motors, like a tennis ball shooter. Spring-launching all nine at once
is problematic because it could hit and damage other robot, or else it
could hit opposing robot's tether
- Ball getter: tongs? (later: tongs are problematic. Switch to
rubber one-way ball valve)
- Ball pusher: pneumatic? (later: specific ball pusher
scrapped. Instead, ball getter arm gets used for defense and ball
pushing)
- Put this thing on wheels.
Benefits:
- Very difficult to defend against unless opponent
designs robot specifically to defend against mine. Not really a viable
option
for anybody
- A real crowd pleaser! Imagine balls launching across the
field!
Problems:
- Ball shooter is difficult to implement, may not be reliable,
motors may not be powerful enough
- Ball acquisition may not be reliable
- Tight spaces: tricky to deal with all the angles and small
spaces that this robot needs.
NUMBER CRUNCHING AND VISUALIZATION:
 |
After the
preliminary thought experiments, I did some number
crunching to see if this design would work (actually, I did some as I
came up with the design to make sure what I was thinking was going to
work) To the left is the spreadsheet I used to do proof of concept for
the design. Using this sheet I was chose which motor to use, an order
of magnitude expectation of how much time there should be between ball
firings. At this point, I imagined I would be able to allow balls to
roll into the shooter one at a time. Real-world testing without such a
mechanism in place showed this to be not a particularly big
problem, as the cylinders in general had enough stored energy to be
able to shoot several balls in quick succession.
|
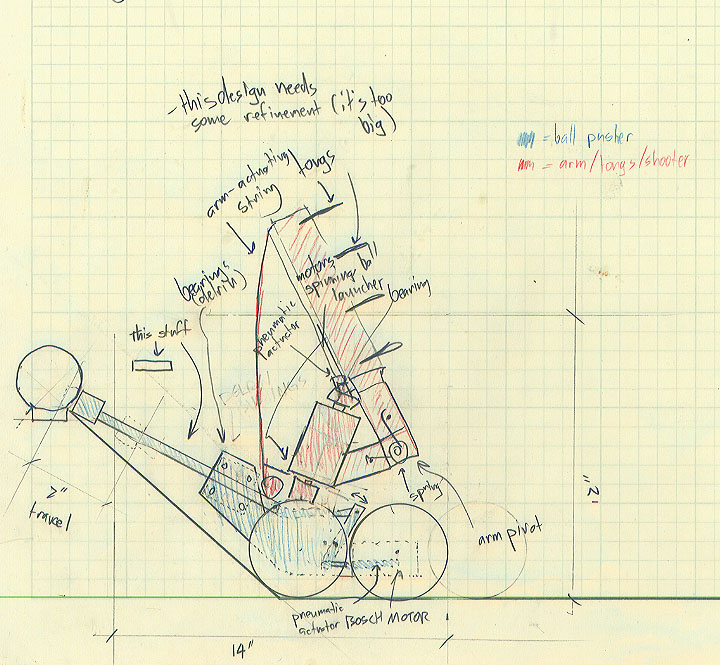
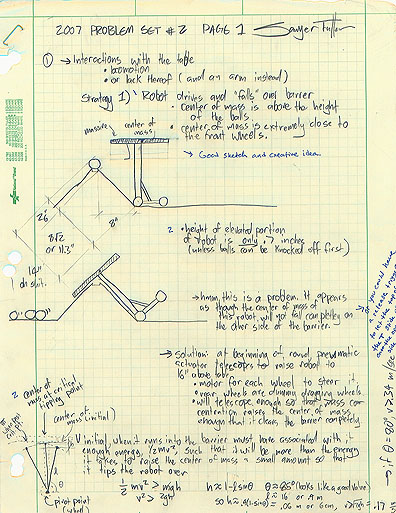
| To the right is
a
to-scale sketch of what I intended my robot to look like. In fact, I
used over seventy pages in my notebook for calculations, idea notes,
scale drawings, and machining plans for this robot. Click here and here for some decently large pictures
(~150k) of other ideas I considered before settling on the ball
shooter idea. |
 |
THE
BUILDING
PROCESS
Or "Whoops, it would have been optimal
had that occurred to me prior to the inception of cutting."
I learned pretty quickly that it's a
big help to draw as much as
you can up before coming to lab. Otherwise, you end up sitting in lab,
confused by trying to think of too many design parameters at once. On
the other side of the coin, the building process is a continual
process of design, build, and re-design, so you do need to come in
and play with the motors and the materials to get a feel for them. You
certainly can't design your whole robot and then just build it. If you
are, chances are your robot is too simple. Usually it takes a little
experimentation to get a tricky mechanism to work.
| The priority for
construction I used was to start with the most fail-prone, doubtful
mechanism first. If I found there was no chance of it working after I
built a prototype, I would have committed as little time as possible
to it. To the right is a picture of the test ball shooter I built. Via
spreadsheet calculations, I was able to conclude that the two polaroid
motors were the way to go. Its design allowed for varying the distance
between the two cylinders, which proved to be an invaluable means to
with reasonable precision fire the balls the distance I wanted - to
the opponent's shelf. The axles are welding rod, and the bearings are
made of delrin lubricated with teflon. Happily, this mechanism worked
like a charm. I added the teflon lubrication to the bearings after I
burned out one of the motors. This was one of the big risks in this
design: I was sending 13.8 volts through motors that were designed for
6 volts, and they could burn out at any time. In preparation for the
contest, I did wire up two backup motors in case of another
burnout. But adding the teflon proved to be sufficient to avert burning
out these motors. |
 |
 |
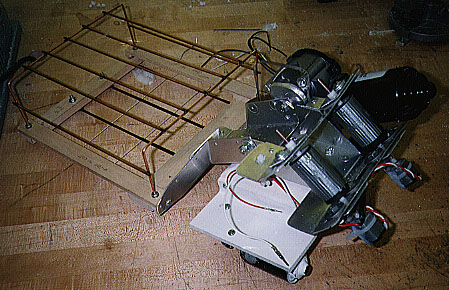
The next stage
was to
fulfill the design parameter of funneling the nine balls into the
shooter. After finishing the most critical and doubtful mechanism, I
started work on the ball acquiring mechanism. After about a week
working on the mechanism to the left, which was supposed to pick up
balls using a tong-like movement, I realized the importance of
cardboard mockups. With this mechanism, the balls went all over the
place. Only after much consternation did I abandon this mechanism. I
had painstakenly milled out holes in the lexan and aluminum to reduce
weight in the frame, did a complex riveting operation to save aluminum
on the tongs, and had even come up with an ingenious geometrical
mechanism to insure the two tongs kept the same angle with respect to
each other as they pivoted. |
Mostly, I regretted losing the high-tech, intricate appearance these
tongs would have given my robot. As a result my robot appeared much
less well made than it could have. Essentially, I felt like this
design cheated me out of the opportunity to really show off my
machining skills. But such is the way of engineering. Besides, I knew
that even though I was losing something by not having these tongs, I
was in fact doing better engineering by not holding steadfast to a
counterproductive idea. A lesser engineer would have stayed with the
faulty mechanism for fear of making something even worse or running
out of time. As this contest has demonstrated to me in retrospect many
times over, nothing ventured, nothing gained. The decision paid off.
As I contemplated, it eventually
became clear to me that I would
have no choice but to take inspiration from past contests and build a
"one-way valve." I had earlier mistakenly discounted the idea,
thinking that a one way valve could only be effective for lifting very
lightweight objects, such as ping-pong balls. I find this sort of
thinking -- just coming to a conclusion without really thinking
something through -- is an obstacle for any engineer who is trying to
come up with an innovative solution to a difficult problem. For this
reason, I prefer to work in small teams. In general the multiplicity
of heads will do an excellent job of eliminating such narrow headed
thinking.
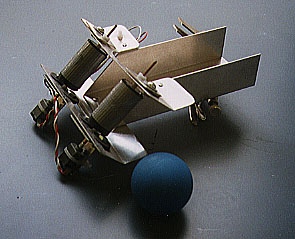
To explain the mechanism here, the
rubber bands "press" through
the rack of nine balls and then restrict the balls from falling back
through. Hence it is a simple and elegant mechanism for getting a
group of balls. This mechanism was far superior because it was
mechanically far simpler, faster at getting the balls, and less prone
to failure. That it didn't look as cool continued to bother me, but
what recourse did I have? This was real engineering, and
what great bridges, yea, even Missions
to Mars, are made
from.
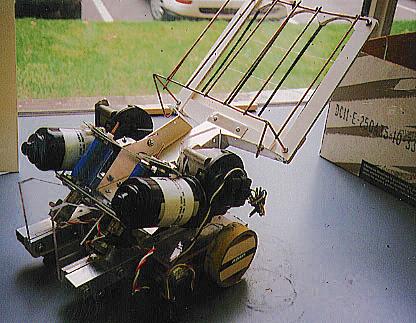
| Here, the
prototype
ball collector is attached to a yet-to-be completed chassis. Once the
balls are in the collector, the arm pivots upward and funnels the
balls into the channel that leads to the twin firing cylinders. To
handle the problem of balls getting clogged in the funnel, I could
simply jostle the arm back and forth and they would fall through. I
was worried that this would be a problem, but that method turned out
to work just fine. Besides, the firing motors needed time to
re-spin-up between groups of balls. |
 |
 |
|
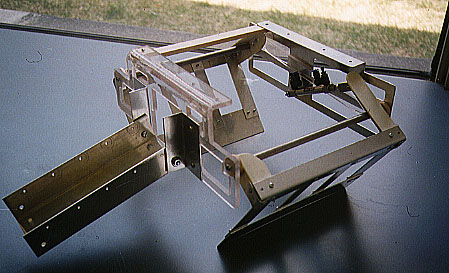
Finishing the
robot
was essentially an excercise of throwing together two wheels (about an
hour of work when you're working in the beautiful, high-tech Papalardo
machine shop like we were), making a last-minute makeshift front two
wheels, and deciding in the end to scrap my pneumatic "ball pusher." I
already had an arm to push balls off the ridge, why did I need a
specialized pusher. This neglecting of the idea of using my arm as a
ball pusher was yet another example of the one-man tunnel-vision
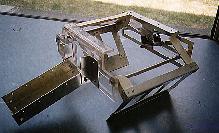
syndrome. To the left are a side shot of the robot with its arm in the
collapsed state (to fit within the space constraints) and an isometric
view with the arm open. |
Make no mistake about it, though. When
the robot was visually
finished, I was far from ready for the contest. One of my big
advantages was that my robot was done a week early. Seppo
Helava, great guy that he is, sacrificed his time to come in and
practice driving my contraption on several occasions. This made a huge
difference. Lots of practice was his idea. It was a good one. The
first time we tried to drive it the robot was all over the
place. There were funny noises coming from the ball shooters (teflon
fixed that), and even one of the motors burned out, as I mentioned
above.
At one point I came to the realization
that I had set up my
robot controls wrong for me: I had given my left hand the brainless
job of running the ball shooter, and my right hand the delicate job of
manuevering the arm. And that was just plain dumb: What had I been
practicing for while I was playing Nintendo all that time? This
contest, of course. And everybody knows it's your right hand gets the
boring job of pushing buttons, and your left hand is the one that
knows how to delicately manuever things. This was especially the case
with Mario 64's proportional movement. Thanks to Keith Breinlinger,
the head T.A. of the contest, we got proportional movement on two
channels, which was exactly what I needed for the arm. So I improved
the human interface to my robot as well.
While Seppo was at classes I made
redundant parts and went through
and made my robot ship-shape. Come the day of the contest, I was
completely prepared, and my robot had been performing well enough that
I wasn't worried about it failing. This, I now know, is a good feeling
to have when entering a contest.
THE
CONTEST
Or "Wow!"

The Short Story:
2nd Place!!!!!
The Long Story:
Out of ten: Five parts design and
workmanship, three parts luck,
and two parts driving skill. I thank tremendously Seppo "sQuink"
Helava for some kick-ass driving, brain presence, mental support, and
awesome strategy ideas during the contest. He's just off to the right
of the picture above. You can see his right arm.
My strategy for handling potential
nervousness was to concentrate
on the fun I was going to have. I broke it down to: each contest is
just a couple of robots, and I'm just curious what's going to happen,
see if my robot was in fact a good design. It seemed to work pretty
well. In general, we had no mental mess-ups, the robot worked perfectly
every time (what bliss!), and we worked well as a team.
Some of the highlights:
- Round 4, against robot #77, a
robot that started on a platform
and drove over to our side to obstruct our robot: After opting not to
take a defensive stance and instead setting ourselves up right in
front of the set of nine balls, we launched the group and then
proceeded to catch him off guard. He drove his robot to the second set
of nine, expecting that to be our next goal and intending to stop us,
and we proceeded to use our arm to instead knock balls off the
ridge. After getting a few more points, we then just lowered the arm
and pinned his robot, stopping his robot from getting onto the
multiplier shelf.
- Round 5, against robot #177, another platformer: This was
great. We set up right in front of the ridge and then just lowered our
arm down in front of him. Subsequently, he found himself eited off his
platform by the force of our arm and consequently a dead duck. At the
crowd's behest, we went back and launched a few balls for effect.
- Round 6, against robot #150, Steve Paik: Yet another platformer
to deny. This one was close, because his robot got under the front of
ours, and for awhile it looked like the balls weren't going to be able
to fall into the shooter. Miraculously, they did, and the crowd got to
see some high lobs (instead of low, fast throws). This turned out to
be somewhat advantageous, because it meant that almost every ball made
it onto the shelf.
- Round 7, against third place Aaron Winters: Using our ball
shooter, we spread balls across his multiplier shelf, and this
functionally disabled half of his scoring potential. His strategy was
to get all the balls off the ridge onto our side and then pull the 18
balls off of the multiplier shelf, but in order to get the balls off
the multiplier shelf, he needed the balls to be in perfect order and
have nothing in the way. We put stuff in the way.
- Round 8, last round, against Tim Zue: What can I say? I opted
for the defensive approach (try to knock him over as he tried to come
over). Unfortunately, Zue had probably the best implementation of a
platformer, having added walls to keep from being pushed off, and we
were unable to dislodge him. And because he had pushed a few balls in
the way, we weren't able to get any balls from the multiplier
shelf. This was the aggressive approach; who knows if the squeamish
(go directly for the nine balls) would have been effective?
CONCLUSIONS
Or, "Sawyer's Secrets for Success"
Ya want 'em? I got 'em.
- Reliability, reliability,
reliability. This means when it's the
last week before the competition, you don't have the time to add one
more feature. Turns out, when you think you are done, you still have
lots more to do. Even though I was done with my robot a week "ahead of
time," I still found I needed to spend all of that week in lab working
out little kinks and making backup parts where appropriate.
- If it seems like you are going to be done way ahead of time, it
probably means you are going to just make it in time.
- You know, it's not that big of a deal. Actually, what you're in
a contest for is to experiment. It's where learning comes from. You're
in this contest to see if your robot was actually a good design. If it
wasn't, if things went well you will be able to identify what you did
wrong. Usually it was a violation of one of the above tenets. If
you're just in it to pamper your resume, you're probably in it for the
wrong reason.
- Risk stuff. But know what your risk is. Engineering is coming
across a risk, thinking, "oh shit, I have no idea how I am going to
make this work," and then through this small level of anxiety
proceeding to think through as much as possible to convince yourself
it actually will or come up with solutions to the problem that enable
it. As Prof. Blanco says, inspiration often accompanies
desperation. But don't forget to remain a skeptic, as well.
- Don't become a worry wart. If you start worrying about every
little thing, you will start to look like NASA does now. Bloated and
slow. Too scared to try anything.
- Uhh. . . and lastly, as Prof. Slocum says, it's always to your
benefit to have a "big box of legos" -- lots of engineering tricks and
experience. If yours is big, you know it and you are probably
continuing to expand it, and if it isn't, there's not much substitute.
Ya can't really
get around it.
Well heck, thanks for reading this
page. I hope you learned
something from it, and I hope you enjoyed it. I had a blast.
Last Updated 9/26/97.


{kind=link}
{kind=link}
{kind=link}