Palleted Automated Transportation (PAT)
 This is a transportation system giving dual-mode
capabilities through the use of flat cars or pallets that
take people in small buses or personal vehicles and that are
routed automatically on guideways. These guideways have
off-line stations (in common with most PRT systems) giving
the possibility of non-stop travel from many origins to many
destinations. Three illustrations of stations are available.
One is an
artist's sketch . A
second shows the layout of a typical PAT rapid transit
station. A
third shows a station that provides for both freight
and auto loading. Such systems can give very high capacities
for lightweight vehicles on small guideways so long as the
headway or spacing between vehicles can be safely kept
small.
This is a transportation system giving dual-mode
capabilities through the use of flat cars or pallets that
take people in small buses or personal vehicles and that are
routed automatically on guideways. These guideways have
off-line stations (in common with most PRT systems) giving
the possibility of non-stop travel from many origins to many
destinations. Three illustrations of stations are available.
One is an
artist's sketch . A
second shows the layout of a typical PAT rapid transit
station. A
third shows a station that provides for both freight
and auto loading. Such systems can give very high capacities
for lightweight vehicles on small guideways so long as the
headway or spacing between vehicles can be safely kept
small.
A pallet or flat-car system was chosen over one
involving dual-mode vehicles (i.e. vehicles able to travel on
the guideway and on public roads) because of safety and cost
concerns. The safety problem is obvious: vehicles used on
public roads would need rigorous inspection each time they
join the guideway. The would also need to carry guidance,
control and propulsion equipment for both forms of travel,
making them heavier, more dangerous in accidents and less
fuel-efficient in their use on the roads. It was decided that
vehicles completely captive in the system but capable of
carrying a wide variety of road vehicles and freight would
combine maximum safety with the lowest practicable cost and
fuel use.
The propulsion and control system chosen by MIT ( and
patented on Independence Day 1972, # 3.673,966, long since
expired) was to drive the pallets by synchronous
vertical-axis electric motors driving pinion gears engaging a
rack on a low left-side guiding wall. Illustrations of a
geared-screw synchronous accelerator and a
synchronous rack/pinion propulsion and control system
are provided. Not only does this system guarantee that
spacing is accurately held, but it converts motors on
vehicles going downhill into alternators, thus pumping energy
back into the system. The critical entrances and exits from
the guideway are made by the pallet engaging a right-hand
guiding wall, on which the power is supplied at an
appropriately varying frequency. A low-tech alternative
acceleration/deceleration system was a variable-pitch screw
drive by a trackside synchronous motor.
The PAT system was modeled on computers and on several
small-scale working systems. Studies of the predicted use
were made by substituting the PAT system for the Boston-area
transit system (the MBTA). The results showed large gains in
ridership and reductions in automobile and truck use. PAT was
designed to be used in dense urban areas, where the guideway
speed would be about 10 m/s, 22 mph; to extend to the suburbs
at 20 m/s, 45 mph; and to be used between cities at guideway
speeds of 40 m/s, 90 mph, perhaps located along the median of
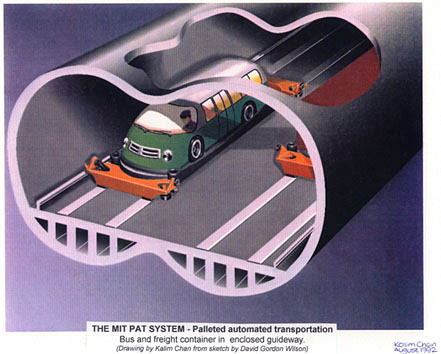
interstate highways. The automated loading and unloading of
pallets would lead to outstanding levels of service for the
movement of both people and freight. An illustration of what
an
auto and a bus on a pallet might look like is provided
as is an
aerial view of how a PAT guideway could be integrated
with a typical freeway interchange.
The PAT group of students and faculty at MIT produced
many reports on PAT and alternative systems. Many of the
illustrations included here are borrowed from these
studies.
The above was written by Professor
David Gordon Wilson of the Massachusetts Institute of
Technology in Cambridge, Massachusetts. He also provided the
illustrations. More details can be obtained via e-mail from
him.
Last Modified: September 1, 1997