A brief introduction of Python for Modeling, Estimation, and Controls.
Syllabus Course Description Principles of computer-aided technology. Computer-aided design, engineering, drafting, and manufacturing; computer-aided design systems, geometry, computer graphics, hardware, computer-aided vehicle/system design synthesis. System demonstrations, laboratories, and site visits.
a first-year graduate-level course on modern control theory. Topics include state-space modeling, solution of state equations, Lyapunov stability, controllability and observability, state-feedback control, observer design, and when time allows, linear quadratic optimal control.
An introduction to modern controls, with concurrent examples in MATLAB and Python
matrix solutions to linear systems, recursive system identification, iterative computation, adaptive estimation and controls.
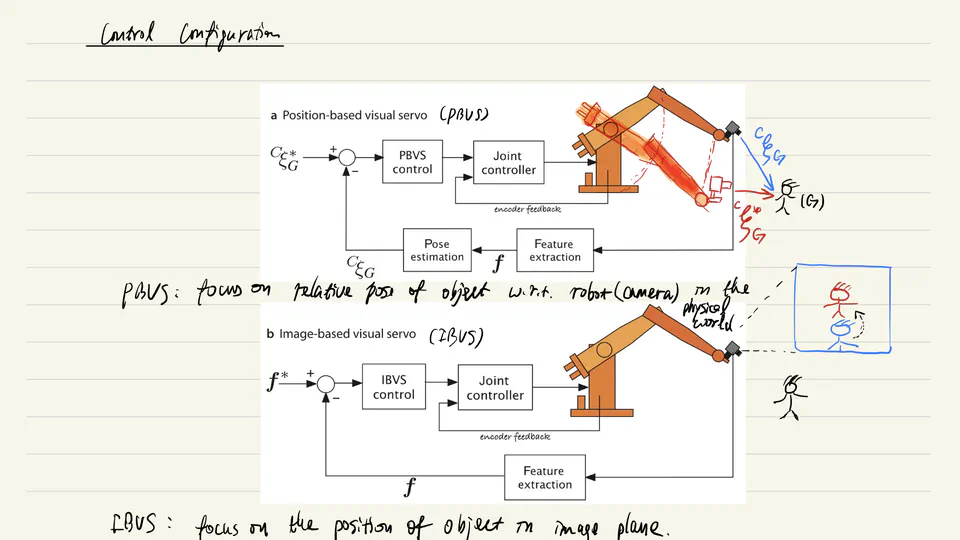
working materials on robotics, vision, and controls for manufacturing.
principle and realization of 3D printing systems.
principles of feedback controls, limits of performance, approximation theory, parameterization of stabilizing controllers (Youla-Kucera parameterization), loop shaping.
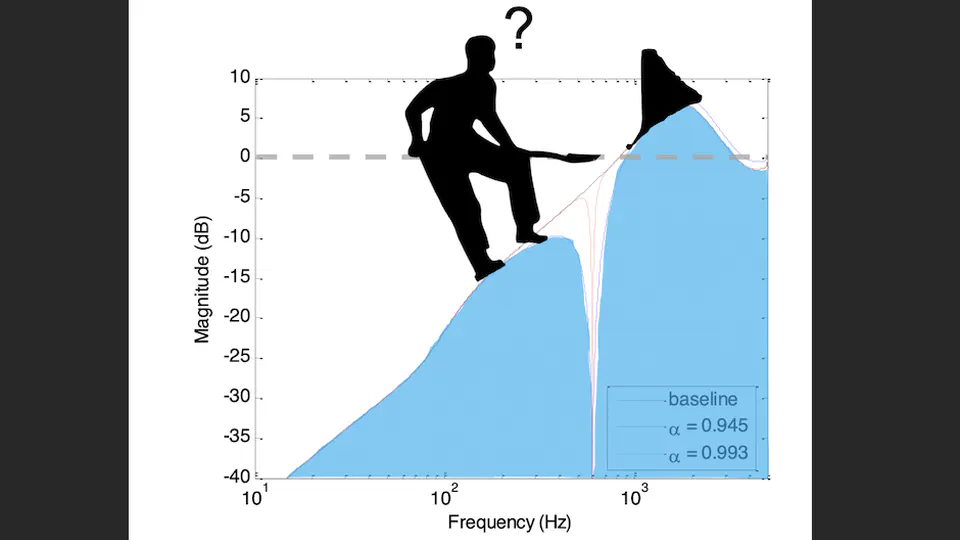
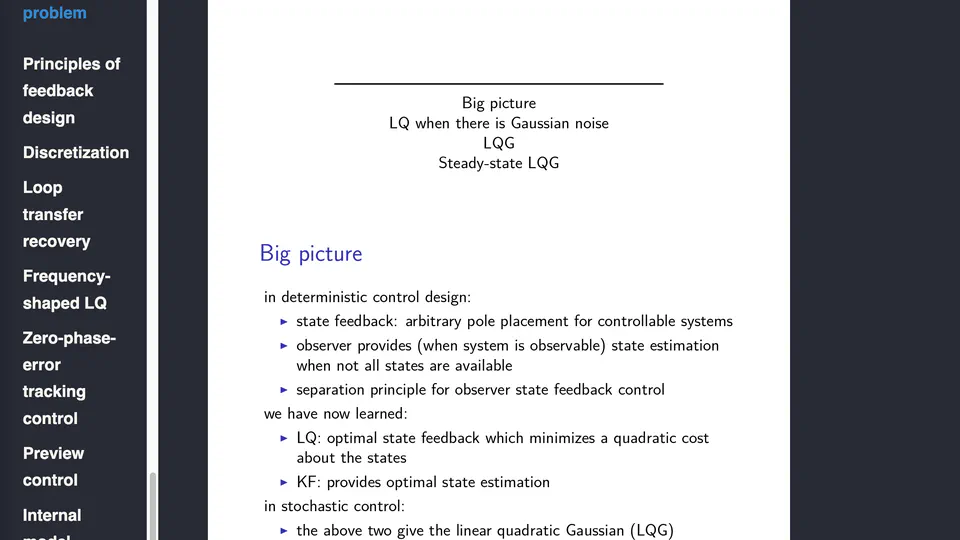
linear quadratic optimal control, kalman filter, linear quadratic gaussian problem, loop transfer recovery, system identification, adaptive control and model reference adaptive systems, self tuning regulators, repetitive control, disturbance observers.