iLSPR A Learning-based Scene Point-cloud Registration method for robotic spatial awareness in intelligent manufacturing
Jan 21, 2026
iLSPR A Learning-based Scene Point-cloud Registration method for robotic spatial awareness in intelligent manufacturing
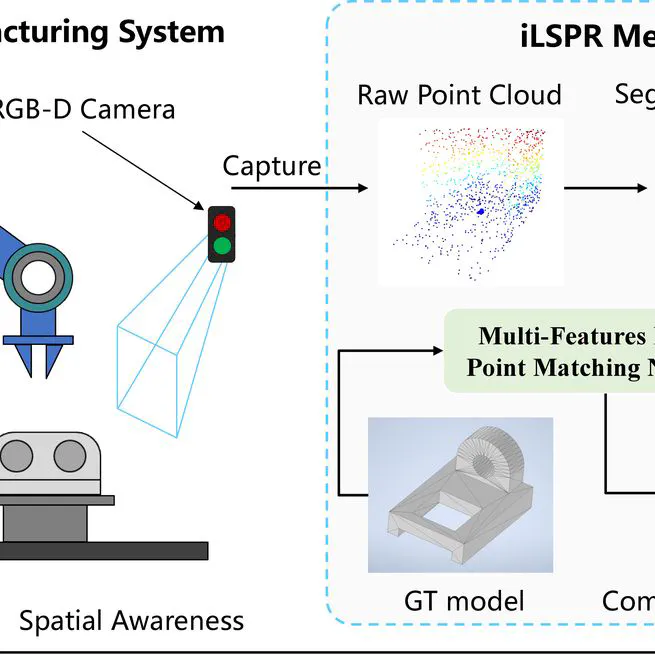
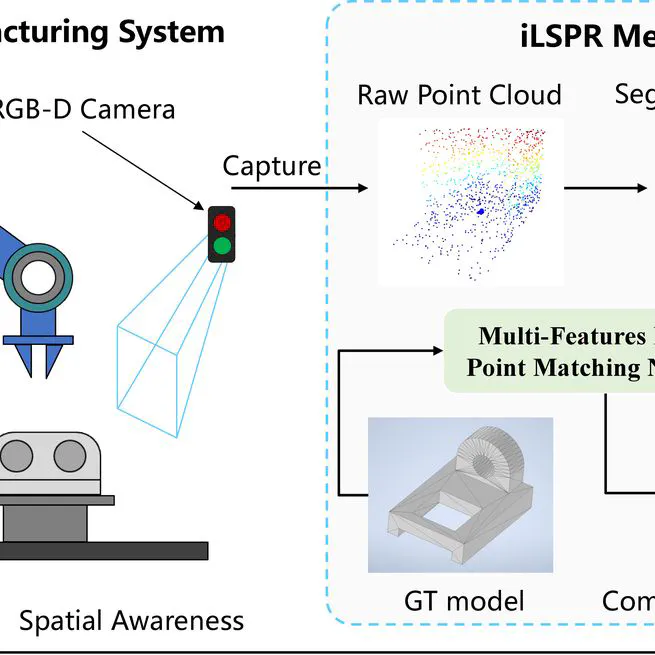
Overview of the proposed iLSPR method for precision industrial scene reconstruction and robotic manufacturing. The robotic manufacturing system consists of a robotic manipulator, a workpiece (object), a platform, and an RGB-D camera. While working, the raw point cloud of the scene is captured by an RGB-D camera, and the partial point cloud of the object is segmented from it by a predefined bounding box. Next, iLSPR selects and registers the object’s ground-truth model in the scene. The scene is then reconstructed and can be used as a spatial guide for the robotic manufacturing system.
Jan 21, 2026
Best Paper on Robotics Award, ASME Dynamic Systems and Control Division
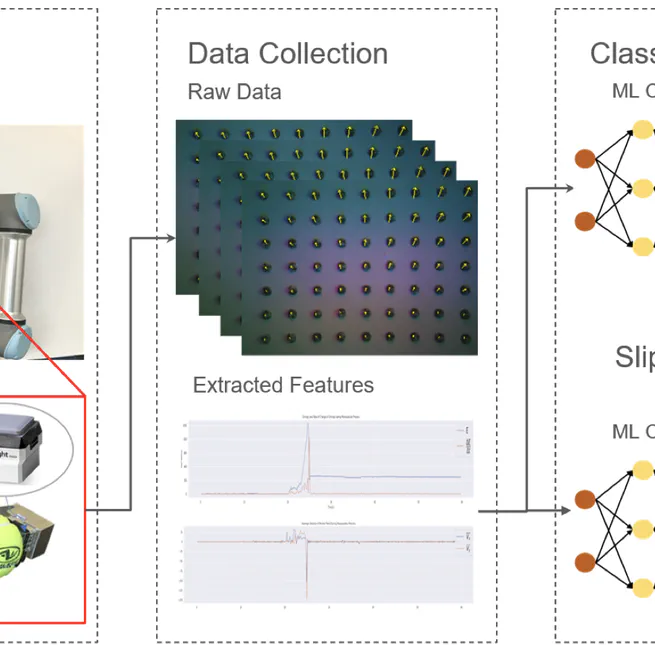
Our work “Learning to detect slip through tactile estimation of the contact force field and its entropy properties” (Xiaohai Hu, Aparajit Venkatesh, Yusen Wan, Guiliang Zheng, Neel Anand Jawale, Navneet Kaur, Xu Chen, and Paul Birkmeyer), presented at MECC 2024, won the best Robotic Paper award from the ASME Dynamic Systems and Control Division. Read the extended journal version of the paper at Elsevier Mechatronics. Huge thanks to Xiaohai(Bob) Hu, who tirelessly iterated through several revisions, and all the other co-authors, for their contributions. A big thank you to Amazon Science for their generous funding that supported this work.
Oct 25, 2024
Learning to Detect Slip through Tactile Estimation of the Contact Force Field and its Entropy Properties
Oct 1, 2024

ARM Champion Award
I am honored to have been named an ARM Champion, an award recognizing individuals from over ARM’s 400 member organizations who go above and beyond the standard call of membership. This recognition is especially meaningful as I was nominated by both the internal ARM Institute technology team and Debbie Franklin, Associate Vice President of Strategic Initiatives and Industry Engagement at Wichita State University. I am deeply grateful for the support and encouragement of my colleagues and collaborators who make achievements like this possible. You can read more about the 2024 Class of Champions here. Thank you all for being an integral part of this journey!
Sep 20, 2024
Best Paper, ISCIE/ASME International Symposium on Flexible Automation
“Agile Surface Inspection Framework for Aerospace Components Using Unsupervised Machine Learning,” Arun Nandagopal, Abhishek Kulkarni, Colin Acton, Krithika Manohar, and Xu Chen, Japan Institute of Systems, Control, and Information Engineers (ISCIE) / ASME International Symposium on Flexible Automation It’s been almost six years since we started working on robotic high-precision inspection. There have been so many exciting results (and unexpected happy surprises) along the path. This segmentation result takes in complex geometries, performs optimization to assure full-surface coverage, and provides occlusion-free image capture. The processes are strategically designed to utilize the optimal number of imaging locations, make in-focus image acquisitions, and maintain their applicability across different robots.
Jul 24, 2024
Agile Surface Inspection Framework for Aerospace Components Using Unsupervised Machine Learning
Jul 1, 2024
Introduction to Robotics
Feb 20, 2024

Learning to Detect Slip through Tactile Measures of the Contact Force Field and its Entropy
Jan 1, 2024

Learned Slip-Detection-Severity Framework using Tactile Deformation Field Feedback for Robotic Manipulation
Jan 1, 2024