Learning to Detect Slip through Tactile Estimation of the Contact Force Field and its Entropy Properties
Oct 1, 2024
Best Paper, ISCIE/ASME International Symposium on Flexible Automation
“Agile Surface Inspection Framework for Aerospace Components Using Unsupervised Machine Learning,” Arun Nandagopal, Abhishek Kulkarni, Colin Acton, Krithika Manohar, and Xu Chen, Japan Institute of Systems, Control, and Information Engineers (ISCIE) / ASME International Symposium on Flexible Automation It’s been almost six years since we started working on robotic high-precision inspection. There have been so many exciting results (and unexpected happy surprises) along the path. This segmentation result takes in complex geometries, performs optimization to assure full-surface coverage, and provides occlusion-free image capture. The processes are strategically designed to utilize the optimal number of imaging locations, make in-focus image acquisitions, and maintain their applicability across different robots.
Jul 24, 2024
Agile Surface Inspection Framework for Aerospace Components Using Unsupervised Machine Learning
Jul 1, 2024
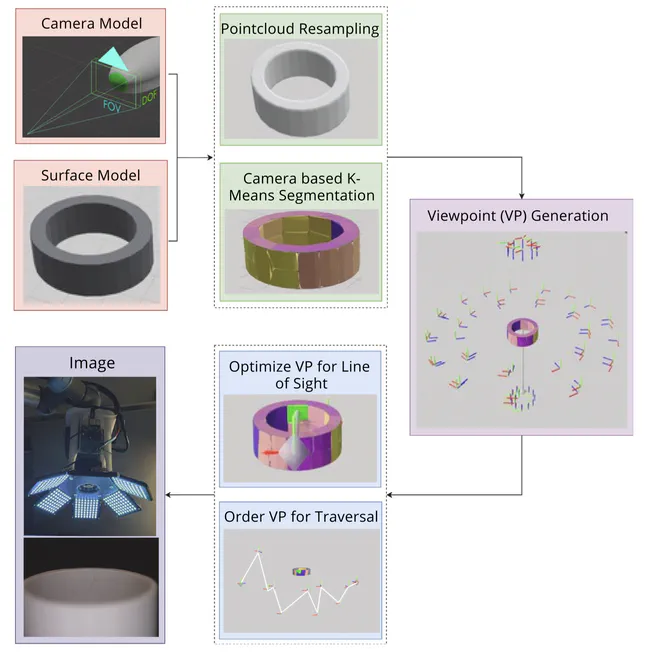
A Robotic Surface Inspection Framework and Machine-Learning Based Optimal Segmentation For Aerospace and Precision Manufacturing
Jan 1, 2024
Learning to Detect Slip through Tactile Measures of the Contact Force Field and its Entropy
Oct 1, 2023
Adaptive Illuminance Control
Apr 1, 2022
Provision of Controlled and Consistent Light Distribution Over an Uneven Topography to Maximize Efficacy of Machine-Vision based Defect Identification
Jun 1, 2021
Adaptive Illuminance Control of Uniform and Uneven Topographies
Apr 1, 2021