iLSPR A Learning-based Scene Point-cloud Registration method for robotic spatial awareness in intelligent manufacturing
Jan 21, 2026
iLSPR A Learning-based Scene Point-cloud Registration method for robotic spatial awareness in intelligent manufacturing
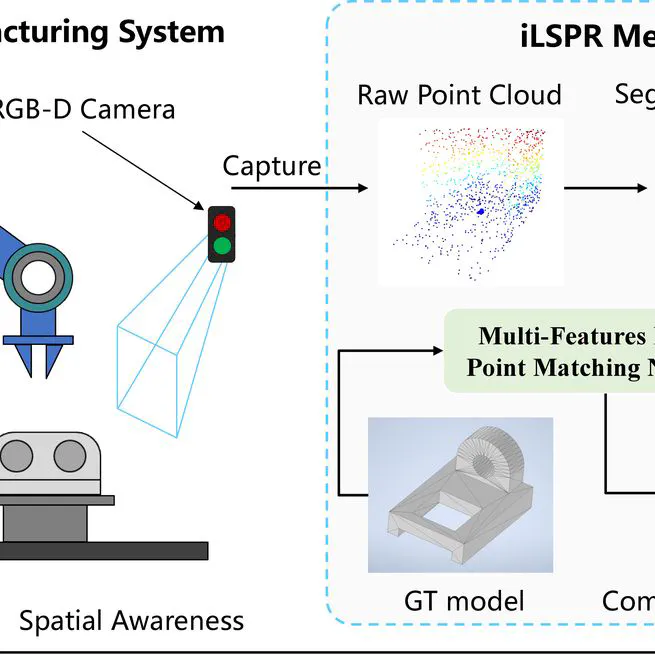
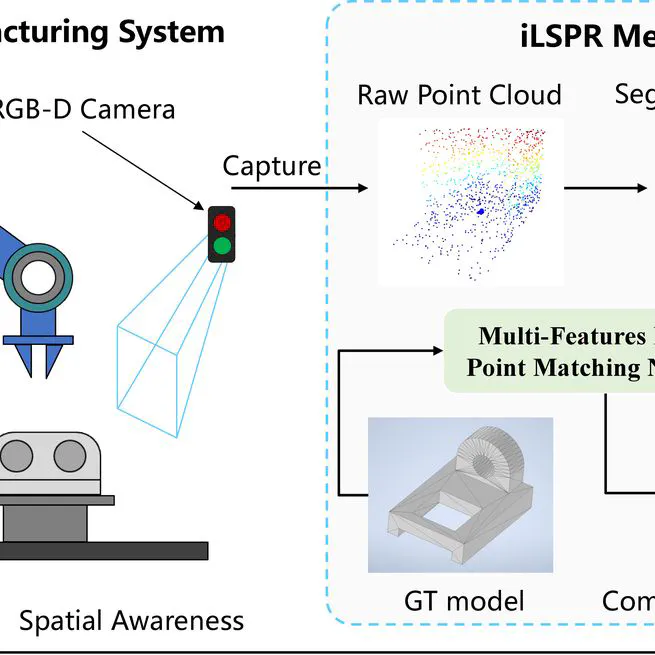
Overview of the proposed iLSPR method for precision industrial scene reconstruction and robotic manufacturing. The robotic manufacturing system consists of a robotic manipulator, a workpiece (object), a platform, and an RGB-D camera. While working, the raw point cloud of the scene is captured by an RGB-D camera, and the partial point cloud of the object is segmented from it by a predefined bounding box. Next, iLSPR selects and registers the object’s ground-truth model in the scene. The scene is then reconstructed and can be used as a spatial guide for the robotic manufacturing system.
Jan 21, 2026
R-SLPR: Region-based Small-to-Large Point-cloud Registration with Contrastive Learning
Add the full text or supplementary notes for the publication here using Markdown formatting.
Jan 1, 2026
Admittance-Based Surface Alignment for Human-in-the-Loop Robotic Visual Inspection
Add the full text or supplementary notes for the publication here using Markdown formatting.
Jan 1, 2026
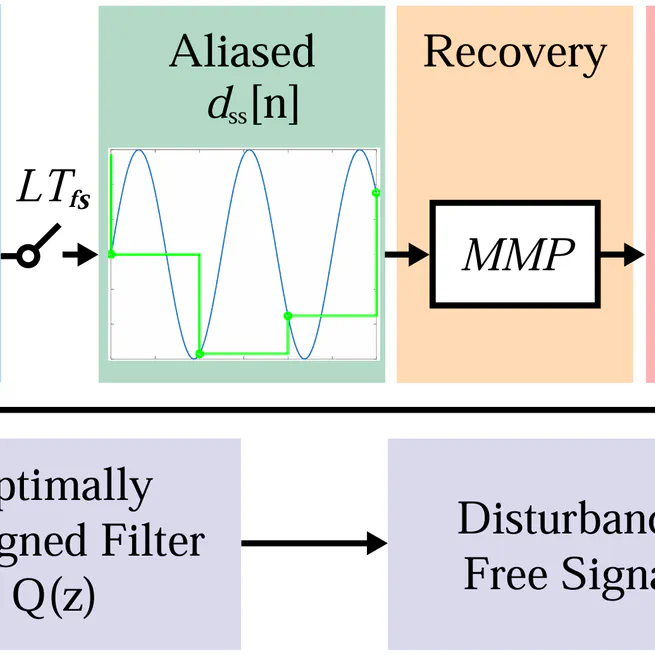
Robust Signal Recovery of Structured Beyond Nyquist Frequency Signals Using Finite and Infinite Impulse Response Filter Designs
Aug 25, 2025

Effect of Intra-Build Design Parameters on the Fracture Toughness Properties of EBM Ti6Al4V
Jul 1, 2024

Learning to Detect Slip through Tactile Measures of the Contact Force Field and its Entropy
Jan 1, 2024
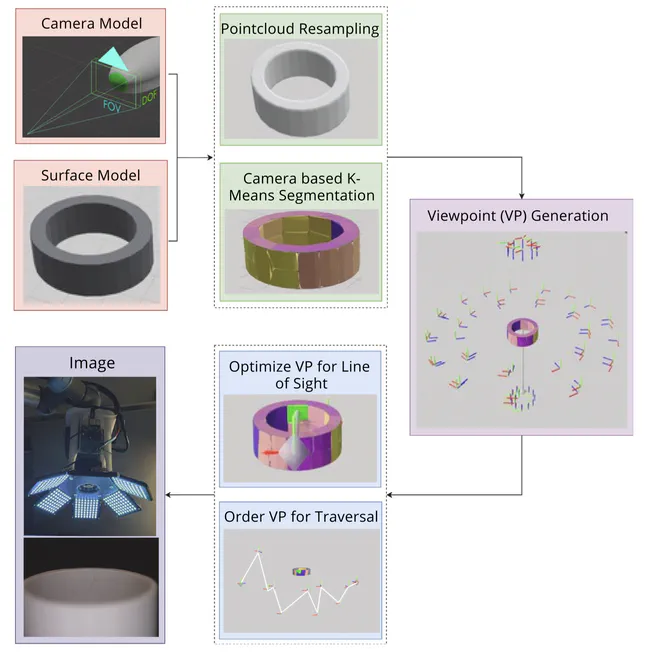
A Robotic Surface Inspection Framework and Machine-Learning Based Optimal Segmentation For Aerospace and Precision Manufacturing
Jan 1, 2024
Multi-Track Melt Pool Width Modeling in Powder Bed Fusion Additive Manufacturing
Oct 1, 2023

A Recursive System Identification With Non-Uniform Temporal Feedback Under Coprime Collaborative Sensing
Oct 1, 2023