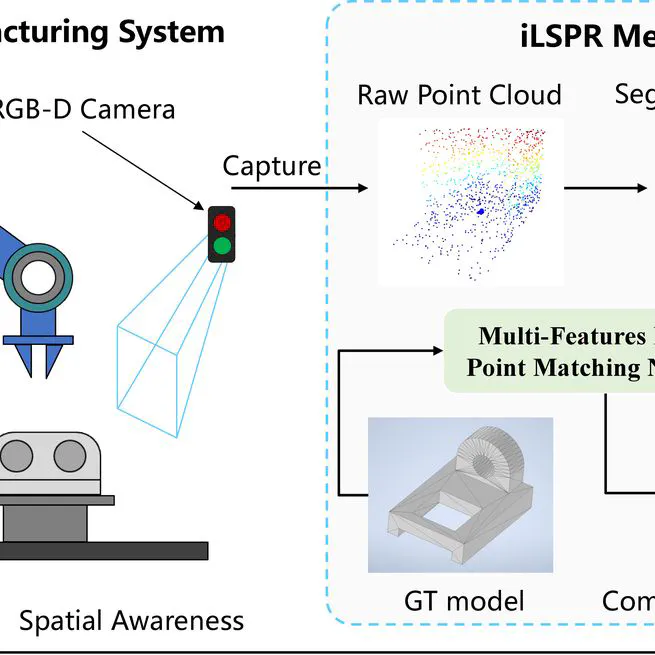
iLSPR A Learning-based Scene Point-cloud Registration method for robotic spatial awareness in intelligent manufacturing
Overview of the proposed iLSPR method for precision industrial scene reconstruction and robotic manufacturing. The robotic manufacturing system consists of a robotic manipulator, a workpiece (object), a platform, and an RGB-D camera. While working, the raw point cloud of the scene is captured by an RGB-D camera, and the partial point cloud of the object is segmented from it by a predefined bounding box. Next, iLSPR selects and registers the object’s ground-truth model in the scene. The scene is then reconstructed and can be used as a spatial guide for the robotic manufacturing system.
Jan 21, 2026

PyHDD Benchmark
Open-source nanometer precision control, written all in Python.
Oct 26, 2024
Slip Severity and Control
Learning the Severity of Slip during Robotic Manipulation.
Jul 22, 2024

Boeing Advanced Research Collaboration at UW
(as Director) The Boeing Advanced Research Collaboration (BARC) at UW is an interdisciplinary Boeing-UW partnership for the future of flight. BARC unites UW faculty and students with Boeing subject matter experts to evolve aerospace systems with next-generation technologies such as new materials, digital twin, AI, robotics, and human-technology partnership.
Nov 2, 2023
Adaptive Vibration Control Benchmark
High-performance adaptive control scheme for identifying and rejecting unknown and/or time-varying narrow-band vibrations.
Oct 26, 2023
Illustrating Number Theory and Controls
Interactively generate intriguing patterns in nature and engineering. Try it on your own computer!
Aug 22, 2023

American Control Conference 2024
(as Program Committee Member) The 2024 American Control Conference (ACC) will be held Wednesday through Friday, July 10-12 (Workshops to be held July 8-9), 2024 in Toronto, ON, Canada at the Westin Harbour Castle. Toronto is Canada’s largest city and a world leader in such areas as business, finance, technology, entertainment and culture. Its large population of immigrants from all over the globe has also made Toronto one of the most multicultural cities in the world.
Aug 22, 2023

Intelligent Grasping
From tactile feedback to slip prevention
Jul 22, 2023

IEEE/ASME Transactions on Mechatronics
(as Associate Editor 2022-2025) The IEEE/ASME Transactions on Mechatronics publishes high quality technical papers on technological advances in mechatronics. A primary purpose of the IEEE/ASME Transactions on Mechatronics is to have an archival publication which encompasses both theory and practice. Papers published in the IEEE/ASME Transactions on Mechatronics disclose significant new knowledge needed to implement intelligent mechatronics systems, from analysis and design through simulation and hardware and software implementation. The Transactions also contains a letters section dedicated to rapid publication of short correspondence items concerning new research results.
Jul 22, 2023

Composite Manufacturing
From visual to ultrasonic inspections
Jul 22, 2023