Evaluation of the Mechanical Function of a Novel Lower-Limb Biarticular Prosthesis
Presented at Northwest Biomechanics Symposium, 2016
Downloads: abstract, slides
Introduction
There are a number of biomechanical differences between amputee gait and healthy gait. These differences can lead to secondary conditions such as back pain and osteoarthritis related knee pain [1]. The lack of gastrocnemius (GAS) muscle for example is associated with elevated activation of knee and hip flexors and decreased ankle push-off power. To improve amputee gait we are developing a foot-ankle prosthesis with a clutched spring that spans both the knee and ankle joints. We hypothesize that this spring element can emulate GAS function and reduce gait compensations in amputee walking. We have previously shown in simulation that a stiff (100 N/mm) clutched spring element can replicate GAS function [2], and that similar timing to healthy GAS activation is desired. In the physical device however, the biarticular element interfaces with mid-thigh soft tissue of an unknown stiffness, which limits the effective stiffness of the biarticular spring. The purpose of this study was to evaluate the mechanical function of our biarticular prosthesis (BP) in terms of its energy storage and return functionality. We also aimed to measure the effective stiffness of the biarticular spring during gait and make qualitative observations about the timing of the clutch-spring system.
Methods
We built a prototype of our BP, which features a clutched spring that attaches above the knee (with a rigid thigh cuff) and below the ankle. A force sensitive resistor in the heel detects heel strike. A microcontroller with software specified engagement and disengagement timing parameters controls an electromechanical clutch that allows energy to be stored in the biarticular spring. A load cell is attached in series to the spring to measure spring force. One transtibial amputee subject walked on an instrumented treadmill while wearing the BP. 3D motion capture data, ground reaction forces, spring on/off signal, and spring force data were collected at 120 Hz (video) and 1200 Hz (analog data).
OpenSim [3] was used to compute joint kinematics, moment arm, and spring length. A generic unilateral transtibial amputee model was developed in OpenSim such that the residual shank and prosthesis match average mass properties from literature [4,5]. The model has 21 degrees of freedom and 80 muscles of the lower body. Inverse kinematics was performed to determine joint angles, muscle moment arms, and biarticular spring length. MATLAB was then used to estimate the effective spring stiffness of the BP and to calculate power and peak energy stored in the spring. Effective BP stiffness was determined by performing a linear fit to the measured force vs. displacement. Elastic energy stored in the spring was determined by the estimated stiffness value (and the peak force (over the gait cycle, using . Finally, the BP’s contribution to knee and ankle power was determined by the force, F, and moment arm measurements, r(t), multiplied by the derivative of the joint angles, . Power was then integrated to calculate work.
Results and Discussion
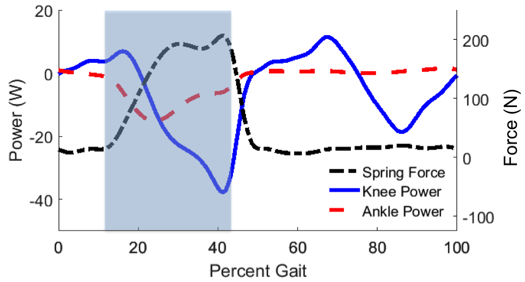
Figure 1. BP Spring force and its contribution to knee and ankle power over one gait cycle. The blue shaded region represents the window for which the clutch was engaged.
The average effective BP spring stiffness was 3.7 N/mm, which resulted in a peak force of 217.5 N ± 15 N over the course of each gait cycle. The total elastic energy stored in the spring during a gait cycle was 6.7 J on average. The total work done by the BP on the knee and ankle was -9.11 and -3.37 J, respectively. Negative work values indicate that the joints did net work on the spring, i.e., more energy was transferred from the knee and ankle into the biarticular spring than was returned from the spring to the knee or ankle joints. A cornerstone of the BP is its ability to allow the knee to transfer power to the ankle so as to increase plantar flexor power during push-off. While a reasonable amount of energy was stored in the spring during this pilot data collection, the clutch disengaged too early in the gait cycle (Figure 1, blue region) thereby preventing the BP from returning the power to the ankle joint. Future work will involve device modifications and further data collection to improve clutch timing.
References
- Norvell DC, et al. Archives of physical medicine and rehabilitation, 86(3):487-49, 2005.
- Willson AM, et al. In: Northwest Biomechanics Symposium; 2015, May 1-2; Seattle, WA.
- Delp SL, et al. IEEE Transactions on Biomedical Engineering, 53, 1940-1950,
- Silverman AK, Neptune RR, J Biomech, 45, 2271-2278, 2012.
- Smith JD, et al. J Vis Exp, 87, 2014.