Simulations of Walking with a Prosthetic Gastrocnemius Spring
Presented at Northwest Biomechanics Symposium, 2015
Downloads: Presentation Slides, Abstract
Introduction
There are a variety of compensations that occur in amputee gait. For example, hip flexor muscles (e.g., iliopsoas) have much higher activation in amputee gait to help propel the leg into swing phase, a task normally achieved by the gastrocnemius (GAS) [1]. To improve amputee gait we are developing a foot-ankle prosthesis with a biologically inspired artificial biarticular GAS spring element. We hypothesized that a biarticular spring element can replicate GAS function and reduce compensatory iliopsoas muscle force in simulations of non-amputee walking.
Methods
We used OpenSim [2] to simulate healthy gait and determine muscle forces for 1) a healthy individual, 2) an individual missing the GAS muscle, and 3) where the GAS was replaced with a clutched biarticular spring. All simulations were performed using a musculoskeletal model with 54 muscles and 19 degrees of freedom. The kinematic and ground reaction force (GRF) data used were from a healthy male walking at 1.2 m/s and provided in the OpenSim package [2]. We scaled the model, ran inverse kinematics, reduced the residuals (RRA), and performed computed muscle control (CMC) for the three conditions. The healthy condition was simulated with all 54 muscles active and no additional force elements added. The second condition, no GAS, used the same model, but the right GAS muscle was removed. In the third condition (spring), the right GAS was removed, and a clutched biarticular spring was added with proximal and distal attachments points matching the GAS. An estimate of GAS stiffness is 100 N/mm [3], so simulations with spring stiffness values of 50 N/mm, 100 N/mm, and 150 N/mm were performed. The timing of the clutch for the spring element was based on knee angle. The spring was engaged at peak stance phase knee flexion, at approximately 13.5% of the gait cycle, and disengaged when the knee again reached this same flexion angle, just before toe off (approximately 60% gait cycle).
Results and Discussion
Compared to the healthy condition, the no GAS condition showed greatly increased peak iliopsoas force of 2552 N during stance phase (Figure 1). Of the spring stiffness values, k=100 N/mm yielded peak spring forces (1666 N) closest to the healthy GAS force (2225 N), and had iliopsoas muscle forces most similar to the healthy condition (Figures 1 & 2). The k=100 N/mm yielded a peak iliopsoas force of 1235 N, much lower than no GAS, though still higher than healthy (946 N).
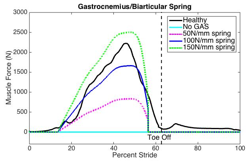
Healthy GAS muscle force compared to spring forces for different spring stiffness values.
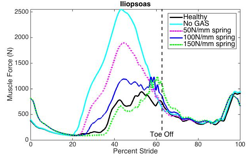
Iliopsoas muscle force over gait cycle for all experimental conditions: healthy, no GAS, 50N/mm spring, 100N/mm spring, and 150 N/mm spring.
Conclusions
This preliminary work supports the hypothesis that the addition of biarticular clutched spring can help reduce muscle forces in typical compensatory muscles. Further investigation is needed to optimize the biarticular spring design parameters such as spring stiffness, attachment points, and clutch timing. Future work will be aimed at modifying the model to better represent a transtibial prosthesis and simulate experimentally collected amputee gait data.
References
- Zmitrewicz RJ, et al. J Biomech, 40, 1824-1831, 2007.
- Delp SL, et al. IEEE Transactions on Biomedical Engineering, 53, 1940-1950,
- Krishnaswamy P, et al. PLoS Comput Biol, 7(3), 2011.