Dual Mode
by Professor Dwight Baumann
Carnegie-Mellon University, Pittsburgh, Pennsylvania
The article was originally published as Chapter 3 of Research Report 5 entitled
Advanced Urban Transportation Systems, by the Transportation Research Insititue,
Carnegie-Mellon University, Pittsburgh, Pennsylvania, in 1970.
The advanced urban transportation systems now quite universally called
"dual-mode" have many antecedents. The basic concept of what now has the generic
name "dual-mode" centers around the hybridization of an automated, individual,
transit system and the private automobile, while retaining most of the features of both
parents. The two modes relate to the system's capability of either being driven by a human
driver in an automobile mode, or by a control system in an automated transit mode. A
dual-mode system uses the same right-of-way for both transit and auto applications. Since
the acquisition and use of right-of-way is the most expensive and potentially contentious
aspect of a transportation system, this dual use offers a compromise solution between the
two political adversaries, the transit and the highway interests.
The term dual-mode has been used predominantly to describe an urban transportation
system as contrasted to either an interurban or a local circulation system for high
density, core-city, or airport use. The primary application anticipated for the commuting
trip is in highly congested areas. Usually the term has been restricted to electrically
powered systems that are thus not direct polluters of the atmosphere. In the automated
mode, the vehicles can also be parked automatically, thus developing considerable
flexibility of storage, ownership, and availability. Taxi, bus, auto rental, and
privately-owned versions of a dual-mode vehicle may differ only in amenities such as
cleanliness, choice of co-passengers, access to golf clubs stored in the trunk
compartment, etc., and will be billed at the costs indicated by the amenities provided.
The basic concept of automating ground transportation systems is not new. Actually there
is perhaps very little that is really new in the entire transportation field if one
considers only the physical concepts of the hardware systems.
This should not be too surprising as it has been estimated that perhaps one fourth of
all the patents issued in the U.S. have possible relevance to transportation. Something on
the order of 20% of the GNP is related to transportation. And the majority of the trips
and the trip miles are urban, so we should expect that the major unsolved problems of an
advanced urban transportation system, the topic of this conference, should be on a
"systems level" of complication. Necessary breakthroughs in the urban
transportation may possibly be related to innovation in the financial, political,
jurisdictional, or management portions of the transportation system, while using
technology that is comparatively close to the present state-of-the-art for automation,
propulsion, structural, and vehicle technology. If this is true, then we have a
significant answer for that large portion of our society that would like to believe that
the problems await an important invention of a new gadget.
The laser, linear motors, air cushions, fuel cells, etc. are all candidates in the
minds of many for that scapegoat, the required breakthrough. The monorail has been the
required breakthrough machine for many generations only to always be found wanting in some
aspects. Perhaps that mythical legal character, the reasonable and prudent man, Mr.
Average, does dream of sleek vehicles that fly through the sky. Isn't in fact, everyone a
transportation expert, and doesn't he dream of banking around curves and stopping at just
the right place—where he wanted to go. Each time the monorail dream has been
investigated, however, some of the same problems are revealed. First of all it doesn't go
to the desired destination. It stops at intermediate stops and thus no matter how high the
top speed, it averages below 25 mph for stations one mile apart and less than 20 mph for
stations one-third mile apart (1). If a network is to be traversed, the waiting time at
the stations increases, and it often entails considerable walking to bring the average
travel speed down to something on the order of 5-10 mph. All this for that sleek,
streamlined vehicle.
On the technical side, the freedom to bank on curves also allows buffeting from wind
and passing vehicles, and must be separately controlled, only to find that more boggie
wheels are needed along with dampers and other paraphernalia. Often it is decided that an
underslung system is really more costly and that an over-riding system is indicated. The
over-riding system, however, is similar to a railroad. And there we are, full circle with
no breakthrough after all. Coming to grips with a problem the magnitude of the urban
transportation problem, one must include as a basic assumption that any change must be
evolutionary in nature. The small degree of revolution needed, however, to create any
change has a threshold to overcome which is proportional to the size of the problem.
Overcoming this threshold will certainly be easier to accomplish by making use of as much
of the proven prior art as possible. Every systems designer, like every chess player,
knows that it is important to plan several moves ahead in order to be sure that the
contemplated procedure is a correct one. The evolutionary staging must be viable all along
the way. And the most difficult of the decisions are associated with maintaining
flexibility to accommodate changes in the perception of the problem, or in the actual
environment of the solution.
The Automated Auto
Because the dual-mode systems are usually proposed for intracity transportation, they are
not often related to their predecessor, the automated auto. The basic concept of
automating the auto is not new. Similarly, autos that ride on a rail have long been used
by the railroads. Railroad automation has been proposed and even tried, usually resulting
in labor problems; i.e. by removing the motorman, a policeman would be required. Having
all the ingredients is not the same as making a cake. Being able to automate the auto has
long been considered an important goal. In the 1950's and early 1960's several electronics
and automobile manufacturers developed prototype automobile guidance and control devices.
The General Motors Autoline concept (2) and the RCA and Philco wire follower systems were
conceived as intercity systems. The national preoccupation with the interstate highway
system, the human proclivity for nostalgic concepts of travel and leisure, and the fear of
the potential boredom that would be associated with the expressway all led to the
consideration of the first automated auto system for long trips. Most of the automated
systems were soon realized to be too expensive for long distance use because the expected
traffic densities were initially quite low. Because startup could not be completed
everywhere simultaneously, any system that required auto modification would not have
enough converted autos at any one time to justify a dedicated lane.
Thus it was usually decided that an intermix of automated and nonautomated vehicles
should be allowed. The presence of this mix of vehicles required that the drivers of the
automated vehicles remain alert even though ordinarily they would not need to operate any
controls. The presence of both driven and driverless vehicles required that substantial
headways be maintained to account for the reaction time of drivers and monitors of the
automated vehicle. The General Motors group determined that regularizing the flow would
account for the major portion of the potential improvement created by an automated system.
The magnitude of the improvement was determined to be only on the order of a factor of two
increases in lane capacity. To obtain this factor of two, both the roadway and a very
large number of vehicles would need to be equipped with electronics, and all this at an
unknown and untested level of safety. It is indeed unfortunate that the automated auto
experiments were not continued sufficiently to obtain data for actual application, as
these results would be useful in deciding the redundancy requirements for electronics
needed in a mass-produced guidance system.
One conclusion of the auto companies in earlier automated auto studies was that by
increasing the amount of control equipment supplied to the user and the highway, its
exposure to product liability suits would increase substantially. The official G.M.
position on why it did not proceed on the automated auto experiments was exactly this
concern, that it could not overcome the legal liability unless the government stepped in
and defined liability limits that would reduce this exposure. This concern has had
considerable discussion during the last ten years, and certainly the risk of exposure has
increased due to recent court findings and increased public concern with highway safety.
The liability problem associated with automated transportation is certainly of prime
importance in the development of any advanced urban transportation system. The Nader era
has decreased rather than increased the amount of boldness that equipment producers are
willing to apply to developing new components. Certainly the liability problem has several
solutions, each or all of which must be engaged in the development of dual-mode.
Legislative action limiting the liability of the system operator, the designer, and/or the
manufacturer to a specified degree is one solution. This would be similar to the limited
liability associated with international air transportation. A second approach would be to
establish a massive insurance underwriting program that would evaluate the risks and add
the cost to the user charge. Certainly if the new system is to be self-sustaining it must
consider liability for property damage and personal injury as part of the operating cost;
whether the designer, the manufacturer, the operating company, the insurer, or the
government holds the funds needed for liability payments. Either limiting the liability or
subsidizing it passes the cost on to the user with the possibility of inequity, depending
on how many benefits can accrue from a system that is both public and private.
Since the automated auto experiments of the 1960's, there have been proponents of the
idea that the automobile should evolve toward the complete automation of the driver's
function. They argue that the driver's functions can be taken over by machines, one
function at a time, until at last the driver is no longer needed. They suggest that first
speed control, then steering, then control, etc., could be implemented. The improvement to
an expressway that is already grade separated is assumed, when the primary problems are
the public's concern where an expressway should be built. If one considers incremental
automation of the auto in areas requiring a large number of access and egress ramps, and
constructing grade separation to isolate the system from pedestrian traffic, it then
becomes clear that there is actually a requirement for size and cost reduction. This might
be associated with development of what has come to be known as a separate
"guideway" for the automated vehicles.
Another difficult problem occurs when the system is not on a separate, single guideway.
While it may be possible to detect reliably any changes in headway between vehicles
following each other, it is a problem of pattern recognition of a very high order of
sophistication to recognize that a vehicle, a boy with a ball, or some other object, is
going to swerve into the path of the vehicle; particularly when it occurs too closely to
allow for stopping or other avoidance procedures. Even detection and programming of
possible avoidance procedures is yet unsolvable without a very extensive data processing
capability. The first serious attempts at automating the automobile were an interesting
solution to the wrong problem.
The problem concerns the city and commuters rather than intercity travelers. A system
is needed to provide the safety and capacity of the interstate highway, while being
compatible with the scale of the city. An equitable distribution of transportation
capability to both the driver and the nondriver is also needed. The latter is particularly
important when we realize that only less than half of the population is licensable to
drive. The dream of the automated auto on an expressway, (many dream of it along the
median strip), is somewhat like the monorail in its general attractiveness to the public,
as well as to a great many professional transportation specialists.
Like the monorail, the dream partially dissolves upon further investigation, but the
automated auto dream is realizable and important. The dual-mode hybrid is an evolutionary
mechanism that makes staging possible, without requiring grade separation and the solution
of the general pattern recognition problem first. With the dualmode concept, there is
perhaps more reason to solve the commuter, the parking, and the air pollution problems
within the city. Once the most pressing problems are solved, it will be relatively easy to
extend automation to the intercity network, and later to convert that one lane of the
expressway that has, so often, been proposed.
The Dual-Mode Innovations
The realization that a large portion of auto trips are repetitive commuter trips, came
quite simultaneously to several groups of investigators. Since it has been stated that a
significant percentage of the 3.5 million patents in the patent office relate to
transportation, it would be impossible to list or even to collect here all the references
to developments that could be categorized as the general advent of the Dual-Mode Decade,
the 1970's. At M.I.T., several student design projects were initiated by the author with
others starting in 1961; the first being a creative engineering class' battery powered
dual-mode vehicle for the commuting trip. The results of the first study were made
available to a junior design class that went on to design the "Commucar" system
(3) which was also battery powered. Between these two studies, the idea of the third rail,
and a power and steering control pickup arm with associated switching capability were
developed. A detailed design study of a battery plus track powered system was undertaken.
This design class voted to try to implement the side arm rather than the slot-car approach
previously used by the creative engineering class. This Commucar project than became the
predecessor of the Metran
Project (4) which in 1965 investigated the evolutionary aspects of installing an
automated system. The inter-disciplinary graduate systems design course that produced the
Metran Report was coordinated to include some 37 students and 10 faculty members.
Among the systems implementation concepts introduced by the Metran Project were the
innovation of the demand-actuated Dial-A-Bus (Genie) systems, then conceived as a feeder
for dual-mode; and the personalized capsule (Perc) central city circulation system. As a
result of the project, it was proposed that the development of a dual-mode system be via
the transit mechanism, with the Genie system as feeder, to build up the patronage; and
perhaps a Perc system of central city circulation to assist in the downtown congestion.
The Metran guideway system and its precedent Commucar guideway system were conceived to be
very generalized guideways that could contain and control vehicles of all types and a
large range of sizes. The Glideway (5) report, a High Speed Northeast Corridor Study
coordinated by the author which preceded the Metran project, specifically introduced the
single car-carrying pallet for high speed intercity use. This system, as well as other
freight handling pallets, were included as a part of the background of the Metran report.
The basic advantage of the pallet system might be found in the methods of
implementation since they would require no modification of the vehicles, and thus could
aid in the evolutionary aspects of a guideway system. Our basic position has always been
that the guideway must be general enough to accommodate various vehicles, including
freight and auto carrying pallets, autos, and small buses. Concurrently with the Commucar
development, the Self-Transit Systems Corporation was organized in Westboro,
Massachusetts, to work on what they named the StaRRcar system (6) (7). Alden's group
raised some capital and began the development of a prototype vehicle that has been
demonstrated on a short piece of track although it was never automated. The Alden
dual-mode StaRRcar consisted of an undercarriage that operated in an enclosed box channel,
and top slot supporting the vehicle by posts protruding upward through the slots.
Other approaches investigated by the Alden group included a roof-mounted system that
carried vehicles on a monorail-like configuration (8). Like the Commucar project, the
StaRRcar approach was to accomplish the switching on the vehicle rather than by moving a
section of rail. It grasps a right-turning or a left-turning rail to switch. Since that
time the Alden group has digressed in the direction of single-mode automated circulation
systems and has built a breadboard prototype of a vehicle and control system. Also,
simultaneous with the developments at M.I.T., the Cornell Aeronautical Laboratory's
Transportation Research Department headed by Robert A. Wolf (particularly, the group under
Morton I. Weinberg) began development of what was then dubbed the "Urbmobile"
(9).
This system was also conceived as a battery-plus-track powered small vehicle that was
to operate with a synchronous motor, using steel wheels located co-axially with the rubber
tires. Throughout the various stages of development, the concepts were refined, and the
most recent reports (10) discuss a chopper-driven electric motor controlled by a stable
oscillator drive to give synchronous performance. It alternately rides on the steel rail
or on the rubber surface changing at switches, as shown in Figure 3.1.
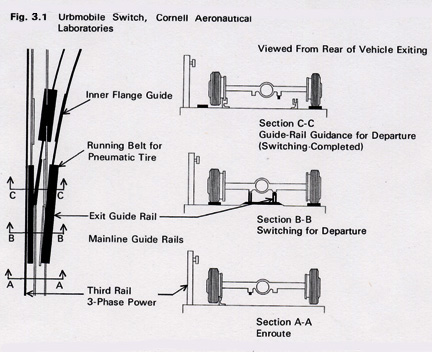
The basic concept requires the wheel to drop down on its rubber surface when
negotiating the switch. The rubber belts accommodate the difference in peripheral velocity
of the wheels. The need for this reliance on tires negates the arguments of rubber tire
reliability because the tires must certainly function at this most crucial switch
location. More recently work has continued on pallet concepts similar to the Glideway
pallet. While these are all perhaps just extensions of the general piggyback approach to
railway utilization, a number of proposals have been made to use railway-type pallets for
handling intra and intercity traffic. More recently, the McDonnell Aircraft Corporation
conducted an extensive (allegedly 1 million dollars), but unpublished study of an
underground pallet system for St. Louis. The McDonnell study showed that a single
car-carrying pallet would cost about $10,000 per pallet and essentially pointed up some of
the basic pallet features such as the vehicle's deployment problems, and loading and
unloading facility requirements.
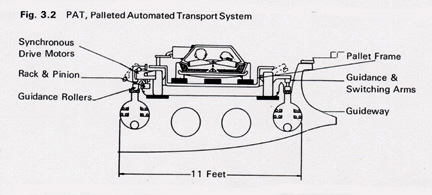
Even more recently, Professor David Wilson of M.I.T. has proposed a pallet system shown in Fig.
3.2, (11). Professor Wilson's proposal includes rack and pinion drive in order to
implement the basic system synchronism. Like all the previously discussed dualmode
systems, his approach also presently utilizes on-vehicle switching. One of the basic
problems with pallet design is heating and air-conditioning the pallet load, as it would
be undesirable to keep the automobile's engine running during the pallet portion of the
trip. The loading and unloading of pallets, even if massively automated, would result in a
more difficult interface between the automobile mode and the transit mode. The physical
requirement would be a greater space for entrance and exit stations for efficient loading,
availability of pallets at each station to accommodate peak demands.
Dual-Mode Autos - The Guideway System
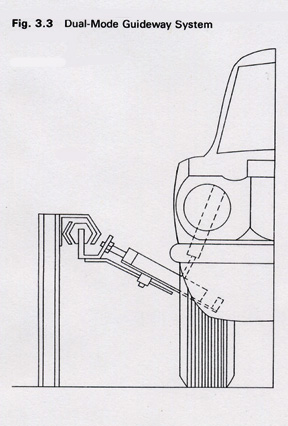 In the summer of 1968, a group of former
Commucar and Metran students with a 1967 Mustang and a $20,000 grant from the Ford Motor
Company began the development of a test facility to investigate some of the concepts of
the side-arm power pickup system coupled with a standard American automobile. Fig. 3.3.
shows the basic arm position as it is attached to a point near the firewall of the
automobile. This particular dual-mode system has been named the Guideway System. The basic
attachment point is chosen for a number of reasons. One, the firewall position is the
stiffest lateral structure of unibody construction. Two, the arm operates near the center
of gravity of the vehicle and thus enhances the stability in a skidding mode. Three, the
stored arm folded into the side of the fender is in one of the least vulnerable positions
with regard to the accidents that the vehicle might incur when off the guideway. Since it
is quite visible to the driver, it allows for manual inspection. Such inspection would not
be possible if the arm were under the vehicle or elsewhere.
In the summer of 1968, a group of former
Commucar and Metran students with a 1967 Mustang and a $20,000 grant from the Ford Motor
Company began the development of a test facility to investigate some of the concepts of
the side-arm power pickup system coupled with a standard American automobile. Fig. 3.3.
shows the basic arm position as it is attached to a point near the firewall of the
automobile. This particular dual-mode system has been named the Guideway System. The basic
attachment point is chosen for a number of reasons. One, the firewall position is the
stiffest lateral structure of unibody construction. Two, the arm operates near the center
of gravity of the vehicle and thus enhances the stability in a skidding mode. Three, the
stored arm folded into the side of the fender is in one of the least vulnerable positions
with regard to the accidents that the vehicle might incur when off the guideway. Since it
is quite visible to the driver, it allows for manual inspection. Such inspection would not
be possible if the arm were under the vehicle or elsewhere.
One principle feature of the arm configuration is that it can operate in a power pickup
channel that is open downward. This means that the channel cannot become easily filled
with foreign objects, i.e. rain, snow, etc. The combined power and guard rail functions as
a power pickup and steering device and as a physical barrier to keep the vehicles on the
guideway, and foreign objects off the guideway. Another feature of the side arm
configuration is the switching characteristic associated with letting go of the rail on
one side and grabbing it with a similar arm on the other side to perform the switching
function. This makes the roadway at a switch completely uncluttered. There are no track
sections or grooves to be traversed by the vehicle wheels.
The basic arm system allows a mechanical fallback position that is in keeping with
present automotive practice where all servo-systems have a failsafe characteristic. This
is particularly demonstrated by comparison to wire-follower techniques. Another method of
deducing the mechanical coupling between the vehicle and the rail results from
investigation of the propulsion requirements. In order to reduce pollution, electricity is
preferred because it allows the pollution to accumulate at a central power plant where it
can be handled economically. The need for ease of control and reliability of the vehicle
propulsion system makes the electric motor drive desirable for an automated vehicle. The
use of on-board electric power obtained from a battery or fuel cell does not increase
reliability in the same manner since then it would still be possible to run out of energy
much like running out of gas. Significantly, fuel cells and batteries have not been
thoroughly developed for this application. When they reach this stage, the dual-mode auto
may well be guideway powered on the track and battery or fuel cell powered on highways.
The track possibly may provide energy for recharging batteries, as recognized in early
descriptions of both the Commucar and Urbmobile.
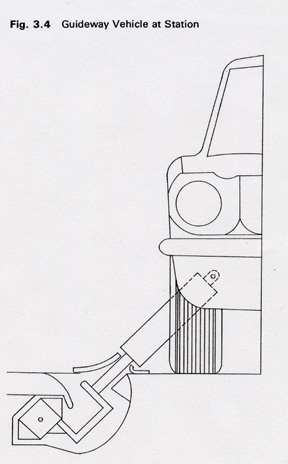 Once the decision is made for electric
power pickup, then sliding contact is very quickly deduced. Putting the slider underneath
the automobile results in either a protrusion or groove in the highway as a method of
isolating the polarities. Side-arm configuration allows this groove to be inverted and
also function as the guard rail and steering device. One of the basic problems associated
with the sidearm design is the operation at stations where access to the vehicle is
required. Fig. 3.4 shows the automobile in a station with the arm flexed downward into a
surface level groove. A collection channel below this groove protects it from being
destroyed by obstruction of foreign articles.
Once the decision is made for electric
power pickup, then sliding contact is very quickly deduced. Putting the slider underneath
the automobile results in either a protrusion or groove in the highway as a method of
isolating the polarities. Side-arm configuration allows this groove to be inverted and
also function as the guard rail and steering device. One of the basic problems associated
with the sidearm design is the operation at stations where access to the vehicle is
required. Fig. 3.4 shows the automobile in a station with the arm flexed downward into a
surface level groove. A collection channel below this groove protects it from being
destroyed by obstruction of foreign articles.
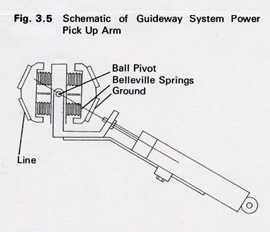
Figure 3.5 shows the schematic design of the basic side-arm follower that has been
selected a s the first prototype. The arm configuration allows power pick up from two
angular plates, one on either side. The experimental configuration utilized an angle of
120� to keep the follower system captive in the guide rail, thus isolating the follower
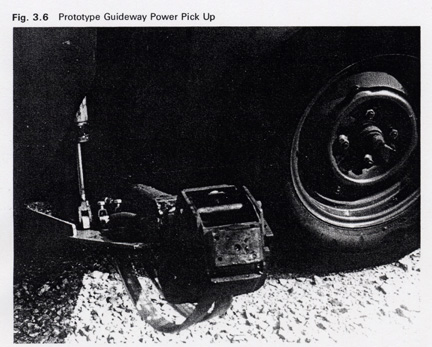
dynamics from the vehicle dynamics. The follower arm must have three degrees of freedom;
roll, pitch, and yaw. Roll and pitch are both accommodated by pivots shown in Fig. 3.6.
The yaw degree of freedom is indicated by the exursion of springs on the power pickup
pads. These springs are mechanically limited so that if the vehicle pulls heavily to one
side, (such as would be the case in tire failure or wheel failure modes,) the arm simply
accommodates the extra force by the mechanical stop. The resulting slider location in this
maximum deflection position still allows the opposite slider to be in physical contact
with its power conductor. The presently designed pad springs are constructed from a stack
of preformed spring-washers that give a constant-force spring characteristic to the
slider.
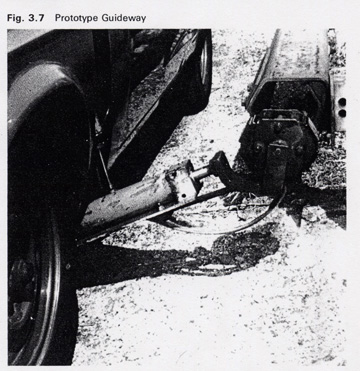
The Mustang system was installed on an abandoned railroad right-of-way with a 200 foot
section of track. The track is basically folded up out of 3/8 inch steel plate with a
composition board insulator and a 120� included angle inside power conductor also formed
from steel plate. Fig. 3.7 shows the automobile on the prototype guideway. To conduct
power tests, a series-wound DC motor (the starter from a diesel truck) was mounted to the
rear of the differential with a chain drive and over-riding clutch For minimum cost
configuration, the power supply of the prototype was comprised of a set of 6 volt
batteries with SCR switching to turn the power on or off in 6 volt steps. This could have
been installed trackside, but would have necessitated bringing out power lines for
recharging. Rather, the batteries and power control system were installed in the trunk of
the Mustang with power led out through the arm, across a shunt, between the two poles of
the power rails, and back into the vehicle in series with the battery supply and motor.
This configuration allows for testing of the complete track, the power-pickup system,
and some investigation of electrical noise characteristics, as well as experiments with
the basic feasibility of side-arm steering. Two steering experiments were undertaken. The
first was the so-called "stiff arm mode" in which the spring loaded side arm
forced the vehicle from side to side, both with the steering wheel locked and in a free
condition. From this operation it was found that it is possible to steer through the small
angles required by a simple forcing system, utilizing the natural caster of the tires. In
later experiments, the side arm was mechanically coupled to the steering linkage of the
automobile via direct hydraulic lines from the side arm cylinder to an equivalent cylinder
on the steering link. This configuration caused the front wheels to steer as a direct
function of the distance of the vehicle from the track. The vehicle and track were
operated in all kinds of roadway conditions, including glare ice, deep snow, and normal
cinder track configuration. In the stiff-arm mode, extreme acceleration on glare ice
allowed some skidding from which the vehicle could not recover if it had gone through too
great an angle. The mechanical coupling overcame this difficulty. On an actual guideway
there would likely be guide rails on either side of the vehicle. Thus, sidewise skidding
of the rear and extreme angles of skidding would be impossible. In addition to these
considerations, an actual guideway would stay hot enough with use to keep snow or ice from
accumulating.
An automated system might have programmed snow plows and ice melters which perform when
required. The mechanical steering system would be the preferred mode, with fallback to the
passive mode of non-crucial failure when necessary. A preliminary computer analysis of the
vehicle dynamics of standard autos with side arm steering indicated no cause for concern
at any feasible guideway speeds.
Since the author is accepting a new position at Carnegie-Mellon University, it is
anticipated that the vehicle and guideway will be transported to the Pittsburgh area,
where it is expected that further testing of this and similar systems will continue.
The Future of Dual Mode Activities
Transportation in America has always been at the apex of focus between the public and
private sector. The private autos on public roads, private aircraft on public airports and
airways, private trains on private rails, and all possible combinations in between, have
been one of the mainstays of our transportation heritage. The dual-mode auto can be
envisaged as either a transit system or a highway system and, as such, further confuses
the issue as to who is primarily responsible for its development. Since the automobile is
such a large sector of the basic transportation economy and since transportation itself is
something on the order of 20% of the GNP, it is difficult to convince the public and thus
Congress that the major development should not be done by the automobile interests. On the
other hand, the automobile interests point out that the government has subsidized the
development of the most recent transportation thrust in aviation, and that they believe it
is government's role to finance this next thrust. As one auto executive put it,
"Anyone who develops an automated vehicle system will need us. And when they are
ready to pay for it, we will be ready to build it".
Systems as large as would be required for implementation of dual-mode, exceed the scale
at which any patent protection on componentry would be significant. Few other mechanisms
exist for providing a private organization the incentive to embark upon so great a
venture. There is some interest in such a venture by aerospace corporations because, as
they point out, they would like to get into a field where profitability is determined by
the establishment of a consumer price rather than a fixed percentage established by
government contracts. The present economic recession may significantly dampen interest in
the private sector of the economy, but it is completely clear that dual-mode activities
will and are continuing in a number of places. There is little doubt that the most
significant urban and mass transit benefits would ensue from the development of this
system. Furthermore, the entire electronics and aerospace technology that is presently in
search of a new field could fruitfully engage in the design and testing of these systems
which would be a significant and substantial improvement to urban transportation.
References
1. Hamilton, William F. II, and Nance, Dana K, "Systems Analysis of Urban
Transportation", Scientific American, Vol. 22 1, pp. 19-27, July, 1969.
2. Gardens, K:, "Automatic Car Controls for Electronic Highways", General
Motors Research Lab., General Motors Corp., Warren, Mich. Rept. GMR276, June, 1960.
3. Baumann, Dwight M., Blanco, Ernesto E., and Mann, Robert W., "Commucar - An
Intra-Urban Transportation System", 1966 National Transportation Symposium; ASME; New
York, May, 1966.
4. Project Metran: An Integrated, Evolutionary Transportation System for Urban Areas,
Interdepartmental Student Project in Systems Engineering at the Massachusetts Institute of
Technology; M.I.T. Press; Cambridge, Mass.; 1966.
5. The Glideway System: A High Speed Ground Transportation System in the Northeast
Corridor of the United States. M.I.T. Report No. 6, M.I.T. Press, Cambridge, Mass.
6. Descriptive Literature from Alden Self Transit Inc., Bedford, Mass.
7. Brush, S.G. et al Patent No. 3,363,584, Jan. 1968.
8. Alden, W.L., Patent No. 3,2 54,608, June 1966.
9. Gilmore, C.P., "How You'll 'Drive' the Amazing Urbmobile", Popular
Science, Oct. 1967.
10. Robert A. Hayman, et al., "Bi-Modal Urban Transportation System Study",
Vol. 1, Report PB 1 78 286, Cornell Aeronautical Laboratories, Buffalo, N.Y., prepared for
U.S. Department of Housing and Urban Development, March 1968.
11. Wilson, D.G., Bisbee, E.J., Clarkeson, and Paul I, "Quadramode
Transport: A Class of Controlled Systems", Urban Engineering and Transportation,
presented at the ASME Winter Annual Meeting, Dec. 1968.

Last modified: June 21, 2003