The SC-2 is a significant upgrade from the previous SC-1 (previously known as SimpComp). This computer has been designed to support executive-mode programming for protection of the kernel in real-time (RT) operating systems (RTOS) support for multi-tasking applications. The SC-2 has many features that are found on higher end computers but is designed to tackle lower end real-time control and instrumentation applications. Floating point instructions are supported in this model by C library emulation. Some opcodes have been reserved for future implementation of a floating point hardware support. Most of the target RT applications will not need floating point arithmetic.
The SC-2 provides sixteen 16-bit working registers (register file). All sixteen registers can be used for data but several ($RC - $RF) are dual use (see below). Address space is 64k (216) bytes. A 16-bit word consists of two consecutive bytes with the high order byte (hob) at the lower memory address and the low order byte (lob) at the next memory address (big endian). Instructions are all one word with the singular exception of the LDA instruction which is two words long; the second word is assumed to be a full 16-bit address. However this instruction is essentially a form of load immediate with a 16-bit immediate field.
The SC-2 is a load and store machine with seven addressing modes. In addition data can be loaded or stored as single bytes or as words. The addressing modes for load and store are:
Computation instructions are strictly register-register. The SC-2 uses a two-address instruction format. The first register designated in the operand field is one operand (for binary operations) and also the destination register for the result. The second register is the second operand. It's contents remains unchanged by the operation, only the destination register is changed.
Control instructions provide for local branching (immediate, using a PC-relative address), long branching (using register-relative addressing), conditional branching on condition code flags (n=negative, z=zero, c=carry out, and o=overflow), subroutine calls, which preserve the return address on the stack (both calls use register-based addressing and one version includes jumping on condition codes), a return from a subroutine, which restores the return address to the PC, a trap call for requesting OS services, and a return from interrupt, which is used to write interrupt service routines.
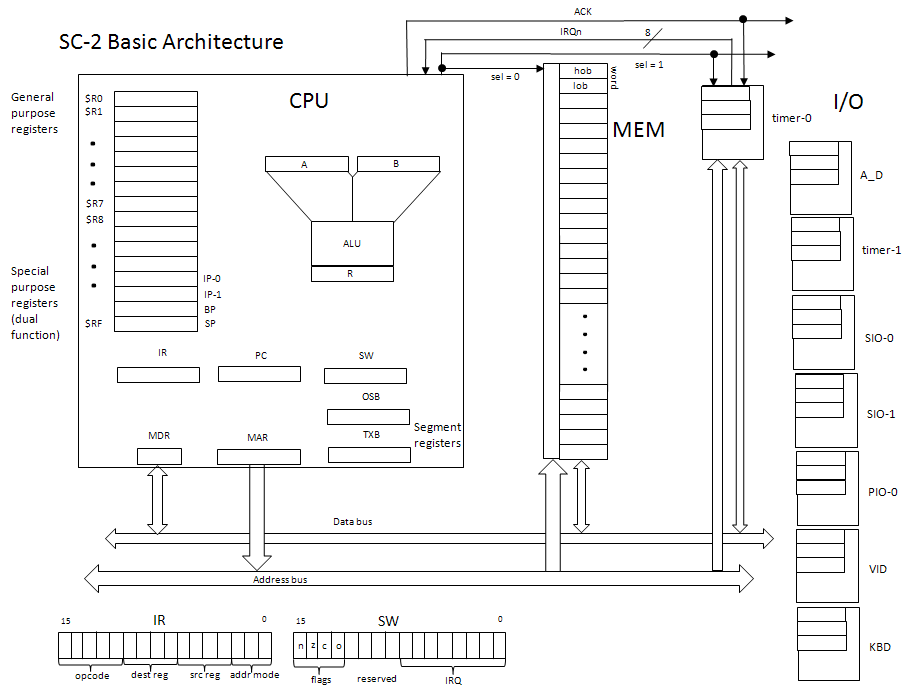
Below are the details of the architecture that are needed by the programmer. Not all registers are accessible programmatically except through side effects. For example, the PC can be changed by a branch or subroutine call and return, but there is no direct load or store. Similarly the status word register (SW) is changed by state requirements (e.g. an ALU operation) and its contents impact program control, but it cannot be accessed directly by the program for direct examination.
The information given below can be used to write a computer simulation of the SC-2. Instructions, their formats, operand requirements, etc. are given in this specification.
Registers: General Purpose: $R0 - $RF 16, 16-bit registers Special Purpose Registers (as indicated) $RC == IP-0 index of source data when loading from data using index mode $RD == IP-1 index of destination memory when storing data using index mode $RE == BP base pointer for base-relative mode $RF == SP stack pointer (system) for push and pop operations. CPU Registers (not accessible directly by programmer) PC Program counter IR Instruction Register SW Status Word Condition Codes: [bF..bC] N : negative Z : zero C : carry out O : overflow Interrupt Request Lines: [b7..b0] Reserved: [bB..b8] F E D C B A 9 8 7 6 5 4 3 2 1 0 [ | | | | | | | | | | | | | | | ] N Z C O|reserve| IRQ lines | Segment Registers (for executive/kernel mode code if used) OSB Operating System Boundary (performing a LDOS instruction sets the boundary for kernel space) TXB TeXt Boundary (all read only memory) ALU Registers A operand A B operand B R result I/O Device Port Numbers I/O Devices and IRQs 0 Timer 0 is PIT0 1 A/D converter is ADC 2 Timer 1 is PIT1 3 Serial (COMM1) is SIO1 4 Serial (COMM2) is SIO2 5 Parallel is PIO0 6 Video display is VID 7 Keyboard is KBD Register Port Numbers PIT0 = 0x00 counter register: PIT0 + 0 timer status: PIT0 + 1 time int ctrl: PIT0 + 2 ADC = 0x08 ADC ctrl: ADC + 0 ADC status: ADC + 1 ADC data: ADC + 2 ADC channel: ADC + 3 PIT1 = 0x10 counter register: PIT1 + 0 timer status: PIT1 + 1 time int ctrl: PIT1 + 2 SIO1 = 0x18 register details to be determined SIO2 = 0x20 register details to be determined PIO0 = 0x28 status: PIO0 + 0 ctrl: PIO0 + 1 data: PIO0 + 2 others VID = 0x30 status: VID + 0 ctrl: VID + 1 data: VID + 2 KBD = 0x38 status: KBD + 0 // bit 0 is the character available flag, a 1 means it is // reading the register clears this bit for the next char ctrl: KBD + 1 data0: KBD + 2 data1: KBD + 3 // this extra data port allows for use of extended ASCII // and special character keyboards - not used in this problem Interrupt Vector Table Fixed address: 0x2100 Device Map 0 = 0x2100 1 = 0x2102 2 = 0x2104 3 = 0x2106 4 = 0x2108 5 = 0x2110 6 = 0x2112 7 = 0x2114 Example I/O device interfaces Polling method Input from a keyboard device - GETINPUT LDI $R0, #0 ; clear R0 IN $R1. #38 ; get status register AND $R1, $R2 ; R2 = 0x0001 mask BRz GETINPUT ; go back and check again IN $R0, #3A ; get char from data register Output to video display ; assumes character to output is in $R0 SENDOUTPUT IN $R1, #30 ; get video status register - bit 0 is clear to send AND $R1, $R2 ; check clear to send bit, 0 means it is clear BRp SENDOUTPUT ; 1 & 1 = 1 so not clear OUT $R0, #32 ; send data to data register for printing
The following conventions apply to interpretation of the instruction set architecture:
Data Movement
The LC-2 is a strictly load and store machine. Data can be moved between working registers.
ALU Operations
Data Movement --------------------------------------------------------------- 00001 LDI $Rd, immed7 // $Rd <- SEXT(immed7) 00001 dddd iiiiiii 00010 LDA $Rd // $Rd(hob) <-M[PC]; $Rd(lob) <- M[PC+1] 00010 dddd 0000000 aaaaaaaa aaaaaaaa 00011 LDB $Rd(lob), $Ra // $Rd(lob) <- M[$Ra] 00011 dddd aaaa 000 // register mode 00100 LDW $Rd, $Ra // $Rd(hob) <- M[$Ra]; $Rd(lob) <- M[$Ra + 1] 00100 dddd aaaa 000 // register mode 00011 LDB $Rd(lob), %$Ra // $Rd(lob) <- M[BP + $Ra] 00011 dddd aaaa 001 // base-relative 00100 LDW $Rd, %$Ra // $Rd(hob) <- M[BP + $Ra]; $Rd(lob) <- M[BP + $Ra + 1] 00100 dddd aaaa 001 // base-relative 00011 LDB $Rd& // $Rd(lob) <- M[IP-0]; IP-0 <- IP-0 + 1 00011 dddd 1100 010 // index, register xC 00100 LDW $Rd& // $Rd(hob) <- M[IP-0]; IP-0 <- IP-0 + 1; 00100 dddd 1100 010 // $Rd(lob) <- M[IP-0]; IP-0 <- IP-0 + 1 // index, register xC 00011 LDB $Rd, @$Ra // $Rd(lob) <- M[M[$Ra]] 00011 dddd aaaa 011 // indirect mode 00100 LDW $Rd, @$Ra // $Rd(hob) <- M[M[$Ra]]; $Rd(lob) <- M[M[$Ra + 1]] 00100 dddd aaaa 011 // indirect mode 00100 MOV $Rd, $Rs // $Rd <- ($Rs) 00100 dddd ssss 100 // register to register move 00101 STB $Rs, $Ra // M[$Ra] <- ($Rs(lob)) 00101 ssss aaaa 000 00110 STW $Rs, $Ra // M[$Ra] <- ($Rs(hob)); M[$Ra + 1] <- ($Rs(lob)) 00110 ssss aaaa 000 00101 STB $Rs(lob), %$Ra // M[BP + $Ra] <- ($Rs(lob)) 00101 ssss aaaa 001 00110 STW $Rs, %$Ra // M[BP + $Ra] <- ($Rs(hob)); M[BP + $Ra + 1] <- ($Rs(lob)) 00110 ssss aaaa 001 00101 STB $Rs& // M[IP-1] <- ($Rs(lob)); IP-1 <- IP-1 + 1 00101 ssss 1101 010 // index mode, xD 00110 STW $Rs& // M[IP-1] <- ($Rs(hob)); IP-1 <- IP-1 + 1; // M[IP-1] <- ($Rs(lob)); IP-1 <- IP-1 + 1 00110 ssss 1101 010 // index mode, xD 00101 STB $Rs, @$Ra // M[M[$Ra]] <- ($Rs(lob)) 00101 ssss aaaa 011 // indirect mode 00110 STW $Rs, @$Ra // M[M[$Ra]] <- ($Rs(hob)); M[M[$Ra + 1]] <- ($Rs(lob)) 00110 ssss aaaa 011 // indirect mode 00111 PUSHB $Rs // SP <- SP - 1; M[SP] <- ($Rs) //TOS points to last value pushed 00111 ssss 0000 000 00111 POPB $Rd // $Rd(lob) <- M[SP]; SP <- SP + 1 00111 dddd 0000 001 00111 PUSHW $Rs // SP <- SP - 1; M[SP] <- ($Rs)(lob); // preserve big endian // SP <- SP - 1; M[SP] <- ($Rs)(hob) 00111 ssss 0000 010 00111 POPW $Rd // $Rd(hob) <- M[SP]; SP <- SP + 1; 00111 dddd 0000 011 // $Rd(lob) <- M[SP]; SP <- SP + 1 ALU --------------------------------------------------------------- 01001 ADD $Rd, $Rs // $Rd <- ($Rd) + ($Rs) 01001 dddd ssss 000 01001 SUB $Rd, $Rs // $Rd <- ($Rd) - ($Rs) 01001 dddd ssss 001 01001 MUL $Ro1, $Ro2 // $R8 <- (($Ro1) * ($Ro2))(how); // $R9 <- (($Ro1) * ($Ro2))(low) 01001 oooo oooo 010 01001 DIV $Ro1, $Ro2 // $R8 <- (($Ro1) / ($Ro2)) integer division // $R9 <- (($Ro1) % ($Ro2)) integer modulo - remainder 01001 oooo oooo 011 01001 AND $Rd, $Rs // $Rd <- ($Rd) & ($Rs) 01001 dddd ssss 100 01001 OR $Rd, $Rs // $Rd <- ($Rd) | ($Rs) 01001 dddd ssss 101 01001 XOR $Rd, $Rs // $Rd <- ($Rd) ^ ($Rs) 01001 dddd ssss 110 01001 NOT $Rd // $Rd <- ~($Rd) 01001 dddd 0000 111 01000 SHL $Rd, $Rs // $Rd <- ($Rs) / 2 01000 dddd ssss 000 01010 SHR $Rd, $Rs // $Rd <- ($Rs) * 2 01010 dddd ssss 000 [What other ALU operations would make life easier for compilier writers?] Control --------------------------------------------------------------- 10000 BR immed11 // PC <- (PC) + SEXT(immed11) - local branch 10000 iiiiiiiiiii 10001 BR $Rr // PC <- ($Rr) 10001 rrrr 0000000 10010 BRc immed9 10010 iiiiiiiii cc BRn 00 BRz 01 BRc 10 BRo 11 // overflow = 1 10011 BRc $Rr 10011 rrrr 00000 cc BRn 00 BRz 01 BRc 10 BRo 11 // overflow = 1 10100 JSR $Rr // PUSHW(PC); PC <- ($Rr) 10100 rrrr 0000000 10101 JSRc $Rr // IF(c == 1) PUSHW(PC); PC <- ($Rr) 10101 rrrr 00000 cc JSRn 00 JSRz 01 JSRc 10 JSRo 11 10110 TRAP vect6 // PUSHW(PC); PUSHW(SW); PC <- (IVT) + SEXT(vect6) 10110 vvvvvv 00000 10111 RET // PC <- POPW 10111 0000000000 0 10111 RETI // SW <- POPW; PC <- POPW 10111 0000000000 1 Supervisor Mode Instructions I/O --------------------------------------------------------------- 11000 IN $Rd, PORT6 // $Rd(lob) <- IOMAP[PORT6] 11000 dddd pppppp 0 11000 OUT $Rs, PORT6 // IOMAP[PORT6] <- $Rs(lob) 11000 ssss pppppp 1 Miscelaneous --------------------------------------------------------------- 11001 EI IRQ8 // SW[IRQ] <- IRQ8 | (SW[IRQ]) (sets bits in IRQ field to 1 to enable) 11001 qqqqqqqq 000 11001 DI IRQ8 // SW[IRQ] <- IRQ8 & (SW[IRQ]) (sets bits in IRQ field to 0 to disable) 11001 qqqqqqqq 001 11010 HALT // RB <- 0 (run bit set to zero to stop clock, requires reset to start) 11010 00000000000 11011 NOP // no operation 11011 00000000000 11100 LDOS immed11 // OSB <- SEXT(immed11) + (PC) (loads executive mode address boundary) 11100 iiiiiiiiiii // used to set the executive mode address limit for protecting kernel 11101 LDRO immed11 // TXB <- SEXT(immed11) + (PC) (loads text address boundry register) 11101 iiiiiiiiiii // used to keep programs from attempting to write to text or const mem