(Courant and Hilbert, 1953) The calculus of variations is a generalization of the calculus of functions. If we are given a function f(x,y,...), defined in a closed region A, we might ask for the point in the region (x0, y0, ...) at which the function f(x0, y0, ...) is a maximum or minimum. The theorem of Weierstrass says that "Every function which is continuous in a closed domain A possess a largest and smallest value in the interior or on the boundary of the domain." If the function is differentiable and attains its minimum in the interior of the region, then the derivatives of f(x,y,...) vanish with respect to each variable at the point (x0, y0, ...); the gradient of the function f is zero there.
In the Calculus of Variations, we expand these concepts to include functionals. In real analysis, a function is a mapping from the real line to the real line: specify a value of x and find the function f for that x. In the Calculus of Variations, the mapping is from a function to the real line. We want the extremal of the functional rather than the function, and we consider all possible functions in some class to find that extremal rather than all possible positions (x0, y0, ...) in the domain A. What is the function that minimizes the functional? Naturally, the function must come from a space of functions, which must be defined for each problem, just as the minimum of a function is for the space of positions in a domain A.
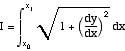
A simple example of a functional is the integral representing the length of a curve connecting the points (x0, x1). The length, a real number, is given by
 (1)
(1)
The length depends on the function y(x), which may be taken as a continuous function with piecewise continuous derivatives (which defines the space). We can then ask for the minimum length of the curve connecting the points y((x0) = y0 and y(x1) = y1. The answer is, of course, a straight line. Below we see how that result is derived as the solution to the "Euler equations".
The Calculus of Variations is first explained for a single variable. Take the variational integral as
![]()
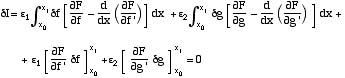
By expressing the function as the extremal plus a variation,
![]()
the variational integral becomes a function of the variables e.
![]()